Драйвер, бесколлекторный профессиональный мотор, 11 года, цвет, 36v




Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара






| Цвет: | Перегретая защита, Модель чрезмерной защиты с USB485, Модель чрезмерной защиты с двигателем 60 Вт +485 |



Примечание: этот водитель подходит для бесщеточных двигателей DC.
Особенности
◆ Поддержка напряжения9 В ~ 36 В., Максимальный выходной ток7A, Номинальный выходной ток5A
◆ ПоддержкаПотенциометр и переключатель, аналоговый сигнал и логический уровень, ШИМ/частотный/импульсный сигнал, RS485Несколько входных сигналов
◆ ПоддержкаКоэффициент Voluntea (Регулирование), Управление с замкнутой скоростью (стабильная скорость), расположение с закрытым управлением (шаг/сервоприводы), управление крутящим моментом (стабильный поток)Многочисленные методы регулировки скорости
◆ ПоддержкаУвеличение, скорость, скорость буфера и контроль ускорения ускорения, Вы можете автоматически замедляться в указанном маршруте.точное местонахождение
◆ Поддерживать независимую от одного устройства питания, двойного потенциометра независимого и двойного поптентиометр сравнить скорость управления
◆ Поддерживать конфигурацию диапазона напряжения и конфигурацию напряжения на уровне логического уровня напряжения сигнала моделирования,Сигнал SIMPT поддерживает 0 ~ 3.3 ВДиапазон напряжения,Логический уровень может поддерживать 0 ~ 24 ВУстранить напряжение;
◆ ПоддержкаВнешний ШИМ, регулировка частотного сигнала к регулировке скорости двигателя, поддержкаВнешние импульсные сигналы выполняют шаг управление двигателями
◆ ПоддержкаMODBUS-RTUПротокол связи; поддерживает использование 485 двигателей для выполнения обязательственно -рассеивания, устойчивой скорости и гибридного управления положениями методов регуляции множественных скоростей
◆ Управление регулировкой тока двигателя, максимальный ток запуска/нагрузки, ток торможения может быть настроен отдельно; поддерживать двигательПерегрузка и ток, блокировка и выключение
◆ Поддержать внешнее соединениеОграничение ограничения переключения и ограничение блокировки
◆ ПоддержкаЭлектрическое фазовое последовательное обучение, тревога неисправности
◆ Частота ШИМ 18 кГц, регулирование скорости двигателяНет пистолета -шумного звука
◆ ИспользованиеARM Cortex-M3@72MHzпроцессор
◆ ПоддержкаИзмерение температуры, перегрев тока/остановки.(Только ограничивается перегреванием средств защиты)
Адрес загрузки информации:http://akelc.com/download/show_70.html
Программное обеспечение Использование ручного адреса:http://akelc.com/download/show_74.html
Сравнение параметров драйвера AQMD3605BLS
| Проект | Стандартный (AQMD3605BLS) | Перегретая защита (AQMD3605BLS-B2) |
|---|---|---|
| Тип контрольного сигнала | Потенциометр, аналоговое количество, ШИМ, частота, импульс, уровень, количество переключения, RS485 | |
| Метод управления двигателем | Регулирование скорости скорости коэффициента Дональда (открытая петля), закрытый цикл скорости, закрытый петлей и управление силой контроля | |
| Диапазон напряжения питания | 9 ~ 36 В. | |
| Рейтинг тока | 5A | |
| Максимальный выходной ток | 7A | 10a (двойной поток)/7a (не -дирекция) |
| Приемной выход | не поддерживается | поддерживать |
| Перегрузка | поддерживать | поддерживать |
| Останавливаться | поддерживать | поддерживать |
| Расположенный | не поддерживается | поддерживать |
| Внутреннее измерение температуры/ Перегрев тока/выключение | не поддерживается | поддерживать |
| Измерение напряжения питания/ Перезаписание/под давлением | не поддерживается | поддерживать |
| 485 защита | ESD | Защита напряжения Co -Mode, ESD |
| Материалы | Основной ИК -качественный импортный оригинал, оставшиеся устройства высокого качества домашнего оригинала | Основной IC High -Catatired Oneric Original |
Подходит для моторных параметров:
- Номинальное напряжение36VДвигатель: соответствующий логотип с номинальной мощностью120WНижеИли определить номинальный ток ниже 5А, электроны работают в течение длительного времени;
- Номинальное напряжение24VМотор,Соответствующая мощность логотипа80WНижеИли определить номинальный ток ниже 5А, командир электроэнергии для полной работы;
- Номинальное напряжение12VМотор,Соответствующая мощность логотипа30WНижеИли отмечал рейтинг тока ниже 5А и вождь вождя электриков в течение долгого времени на работу.
(Этот драйвер имеет длительный рейтинг тока 5A и максимальный выходной ток 7A (десятки секунд). Оценка мощности, отмеченная на двигателе Должен быть рассмотрен при расчете с рейтингом.
Приложения
Сравнение схемы управления позицией
Особая функция
1. Hall Self -Study
Трехфазная линия двигателя и линии сигналов Сан -Холл не подключается к водителю по порядку. Рабочий режим может быть изучен в режиме привода в качестве двигателя путем поворота привода.Учившись 6 раз для двигателя, двигатель можно ездить нормально.
2. Устойчиво контролировать время отклика
Условие испытаний: двигатель 24 В диаметром 60 Вт Диаметр 5,7 см. Чрезмерное 4 двенадцать направление пустого нагрузки за время
Конфигурация параметра: параметры скорости PID настроены, в свою очередь, на 0,2, 0,01, 0,01, конфигурация PID PID составляет 30, 0,01, 0,01, а ускорение ускорения и замедления настроено на 6500 Гц/с.
Результаты испытаний:
Когда алгоритм устойчивой скорости выбирает управление с закрытой скоростью, двигатель переключается с положительного на 3000 об / мин (соответствует 600 Гц) на обратное 3000 об / мин.
Когда алгоритм стационарной скорости выбирает управление с замкнутым контактом по указанию времени, двигатель переключается с 3000 об / мин на обратный 3000 об / мин, время использования составляет около 0,5 с, перекрывающийся объем составляет 1,5%.
3. Чрезвычайно низкая скорость и контроль скорости
Алгоритм управления с замкнутой петлей с замкнутой концентрозой. можно контролировать до 1rpm.
Примечание. Когда чрезвычайно низкое число контролируется, параметры PID PID должны быть меньше, если конфигурация составляет 10, 0,01, 0,01 в порядке.
4. Автоматически замедление управления взаимностью
Во время управления управлением управление драйвер может изучить общий маршрут по возвратному движению (также может напрямую настроить значение). В соответствии с конфигурацией, ускорением замедления и максимальной скоростью двигатель автоматически управляет двигателем для быстрого перемещения в целевую позицию и неуклонно согласно закону Ньютона.
5. Двигатель регулируется в любом положении в фиксированном маршруте
Драйвер может изучить общий маршрут по возвратному движению (также может напрямую настроить значение) перед использованием положения потенциометра, аналогового количества или регулировки ШИМ в фиксированном маршруте.Если потенциометр вращается до средней точки, а коэффициент входной пошлина составляет 50%, двигатель перейдет к точке поездки.
6. Бесщеточный двигатель также можно контролировать шаг за шагом
Выберите входной сигнал в качестве PWM/частота/импульс, настройте тип импульса на импульс и настройте рабочий режим для управления.Затем вы можете управлять бесщеточным двигателем, как шаг двигатель. Вы можете управлять углом поворота двигателя через сигнал импульса, и сигнал импульса управляет направлением вращения. Каждый угол поворота импульса может быть настроен.
7. Мотор без большого беззабота также может быть сервоприводом
В режиме управления 485, драйвер можно повернуть в целевую позицию непосредственно в целевую позицию (абсолютное положение или относительно текущего положения).Драйвер автоматически будет управлять двигателем в соответствии с увеличением набора, ускорением замедления и максимальной скоростью и быстро и постоянно перемещает двигатель в целевую позицию в соответствии с законом Ньютона.Во время упражнения водитель может предсказать оставшееся время для выполнения задачи.
Электрический параметр
| Проект | параметр |
| Входное напряжение мощности | DC 9 В ~ 36 В |
| Рейтинг выходной ток | 5A |
| Максимальный выходной ток | 7A |
| Напряжение интерфейса датчика зала датчика | 5V |
| Максимальное программное обеспечение | 3A |
| Количество выходных каналов | Одиночная дорога |
| Сопротивление потенциометра | 10K ~ 50K |
| Введите диапазон напряжений для получения сигнала | -0,5 В ~ 25 В (кроме выходного порта сигнала ошибки/завершения) |
| Аналоговый диапазон сигналов | 0 ~ 3,3 В Рен произвольно |
| Диапазон напряжения цифрового сигнала | 0 ~ 24V ren, lvttl, ttl, hvttl и т. Д. |
| Шинь входного сигнала. | 100 Гц ~ 10 кГц; примечание: частота выходной сигнал. Фиксированная 18 кГц |
| Диапазон поддержки входного сигнала частоты | 0 ~ 10 кГц |
| Выходная частота ШИМ | 18kHz |
| Выходное разрешение ШИМ | 1/1000 |
| RS485 Диапазон коммуникации | Соотношение Поттера 9600 ~ 115200BPS, биты данных 8, поддерживая странные, даже без проверки, проверки цифр и остановки битов всего |
| Поддержка Modbus | Поддержка Modbus-RTU, поддержка 03H, 06H, 10H код функции, настройка диапазона от 1 до 128 с адреса сайта, трансляция поддержки |
| Резолюция обнаружения тока | 0.04A |
| Стабильная точность управления | 0.1A |
| Соотношение скорости пошлина | 0 ~ 100,0% |
| Устойчивый диапазон регулирования управления | -3276,8 ~ 3276,7 Гц |
| Диапазон регулирования управления местоположением | -2147483648 ~ 2147483647 |
| Диапазон регуляции управления крутящим моментом | 0 ~ 7a |
| Ограниченный контроль | Поддержка; вы можете подключиться к двум лимитным ограничению переключения или ограничению срока блокировки |
| Мягкий запуск/программное обеспечение | Поддержка; может начать, тормозить и установить время замедления и ускорение |
| Защита от перегрузки/блокировки | Поддержка; выходное ограничение по току; |
| Силовая анти -коннекционная защита | поддерживать; |
| Защита выхода от короткого замыкания | Настраивается |
| Тормозное время действия | Программное обеспечение обычно 0,1 с. 0,3 с. |
| ТЕМПЕРА РАБОТА | -25 ℃ ~ 85 ℃ |
| Размеры | 7.0cm×6.5cm×2.1cm |
Принципы
Этот водитель использует ведущую технологию точного обнаружения тока двигателя, ощущение самооценки бесщеточного двигателя, ощущение бесщеточного обнаружения положения вращения двигателя, технологии постоянного тока регенеративного тока (или торможения) и мощной технологии регулировки PID может идеально контролироваться Двигатель стабилен, вперед, направлен и торможение. Выходной ток регулирует управление реальным временем для предотвращения перегрузки, точно контролирует скорость и положение вращения двигателя, а время отклика двигателя является коротким и небольшим.
Электрическое управление замедлением:Мягкий старт тока автоматической регулировки и автоматического управления ускорением, двигатель может быть быстро и устойчивым, а Backbolic Sight может быть меньше.Поддержите время замедления и конфигурацию ускорения.
Электрический контроль привода:Метод торможения энергопотребления автоматически регулируется, а время торможения электрометра является коротким без сильной амортизации.Поддержка торможения текущей конфигурации.
Управление электрическим направлением:Процесс прямого переключения и обратного переключения двигателя контролируется приводом драйвера, а управление замедлением, программным обеспечением и контролем мягкого запуска автоматически контролируется. Независимо от того, как часто изменяется изменение направленного сигнала, он не приведет к повреждению привод или мотор.
Устойчивый контроль двигателя:Через скорость обнаружения сигнала и положения обнаружения и вращения в зале алгоритм регулировки PID используется для управления замкнутым контуром для поддержки двух стабильных методов скорости управления с замкнутой петлей и контроля с замкнутым контуром.
Электрическое управление местоположением:Через положение обнаружения сигнала зала используйте алгоритм регулировки PID для управления с закрытым положением, и используйте сопротивление тормоза, чтобы замедлить.
Управление моторным моментом:Размер крутящего момента двигателя достигается путем настройки размера выходного тока.
Электрическая перегрузка и блокировка защиты:Когда двигатель перегружен, драйвер будет ограничивать выход для эффективной защиты двигателя; Когда двигатель блокируется, привод может обнаружить состояние и приводить двигатель.
Внутреннее подавление вмешательства:Связание схемы привода и цепь управления путем потребления интерференций и ингибирования интерференций в зависимости от времени может эффективно гарантировать, что цепь управления не влияет помехи приводной цепи.
Внешнее помещение подавления:Защитные устройства ESD и цепи электростатического высвобождения используются для выполнения защиты ESD на всех интерфейсах, так что устойчивая работа внутренней цепи и защита внутреннего устройства не будет повреждена при переходной статической электроэнергии высокого напряжения на границе раздела.
485 Подавление интерференций связи:Используйте чип выделения сигнала и мощности, чтобы выделить 485 -повторную схему, чтобы ингибировать помехи.
Определение интерфейса

Конфигурация переключателя диска
1. Конфигурация метода управления
| SW1-SW7 | SW8 | метод управления |
| Произвольно | OFF | Цифровой/аналоговый метод управления сигналом |
| Рабский адрес | ON | 485 Метод контроля связи |
2. Выбор источника сигнала
| SW4 | SW5 | SW8 | источник сигнала |
| OFF | OFF | OFF | потенциометр |
| ON | OFF | OFF | Аналоговый сигнал |
| OFF | ON | OFF | ШИМ/Импульс/Частота |
| ON | ON | OFF | Встроенный -в программе |
3. Конфигурация номинального тока двигателя
| SW1-SW3 | SW4-SW7 | SW8 | Значение тока моторного рейтинга |
| OFF OFF OFF | Произвольно | OFF | Используйте номинальный ток, настроенный в последовательном порту, по умолчанию 4.9a |
| ON OFF OFF | Произвольно | OFF | 1A |
| OFF ON OFF | Произвольно | OFF | 2A |
| ON ON OFF | Произвольно | OFF | 3A |
| OFF OFF ON | Произвольно | OFF | 4A |
| ON OFF ON | Произвольно | OFF | 5A |
| OFF ON ON | Произвольно | OFF | 6A |
| ON ON ON | Произвольно | OFF | 7A |
3. Конфигурация рабочего режима
| SW4-SW5 | SW6-SW7 | SW8 | Режим скорости |
| Разное время | OFF OFF | OFF | Скорость скорости скорости |
| ON OFF | OFF | Управление крутящим моментом | |
| OFF ON | OFF | Скорость закрыта -управление складом | |
| ON ON | OFF | Положение закрыто -лап | |
| В то же время для | OFF OFF | OFF | Моторное обучение |
| ON OFF | OFF | Расписание | |
| OFF ON | OFF | Заданный контроль скорости | |
| ON ON | OFF | бронировать |
Типичное использование
1. Однопространственное устройство занимает соотношение обязательств/управление крутящим моментом/метод управления регулировкой скорости с замкнутой скоростью.
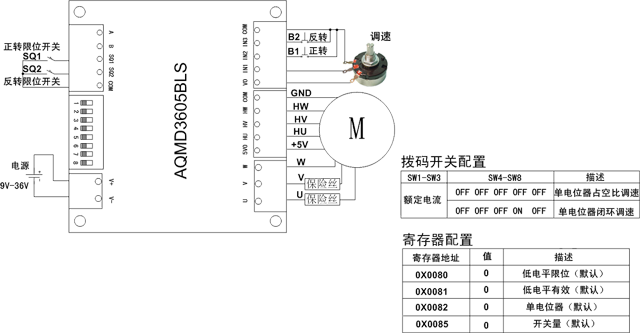
Рабочий процесс этого использования: Используйте регулировку скорости Potentiomer VR1; нажмите B1, двигатель вращается, B1 отскакивает вверх, двигатель останавливается, двигатель останавливается при положительном ограничении вращения, а затем нажимайте B1, чтобы быть недействительным. B2 подпрыгивает, двигатель останавливается, когда двигатель останавливается, когда обратное ограничение перевернуто, а затем B2 недействителен.
2. Двойной потенциометр занимает метод подключения к регулировке скорости в сфере стыковки.

Этот метод соединения включает в себя независимый контроль двойного потенциометра и скоординированный контроль двойного потенциометра.Для независимых методов управления двумя потенциометрами используются для регулировки скорости к двигателю для управления скоростью и управления запуска двигателя и направления через переключатель; Потенциометр VR2 устанавливается.Поместите передний и обратный предел через предельный переключатель.
3. Одиночная машина установки сигнала Сип -Хайпа Сэндж/Управление крутящим моментом/Способность к регулировке скорости с закрытой скоростью.
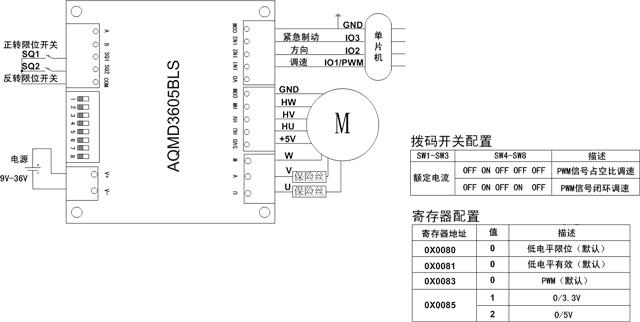
Этот однопримененный микрокомпьютер использования регулирует скорость двигателя с помощью сигнального двигателя ШИМ и контролирует двигатель вперед и аварийно останавливается через IO.COM привода подключен к месту питания однораздельного микрокомпьютера; используется для контроля переднего и обратного и аварийного торможения двигателя.Распределение аванса и отмены через предельный переключатель.
4. Метод подключения однопользого управления положением импульса микрокомпьютера микрокомпьютера
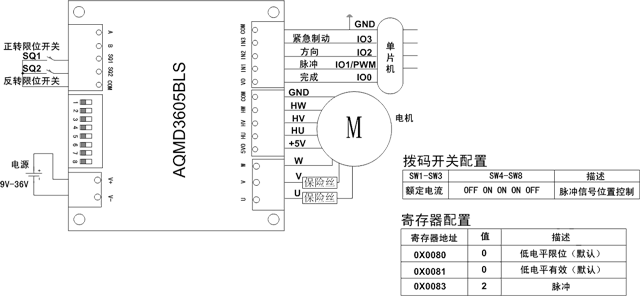
Это использование может реализовать положение вращения двигателя через импульсный сигнал.COM драйвера подключен к месту питания микроконтроллера; Чип -машина используется для управления направлением аварийной остановки; Switch SQ1 и SQ2 ограничены положительным и изменением.
ПРИМЕЧАНИЕ. Выход VO составляет 3,3 В уровня логического уровня. Если одно -гликовая машина не принимает логический уровень 3,3 В, вам необходимо преобразовать его в логический уровень 5 В.
5. PPLC -аналоговый соотношение рабочего цикла/управление крутящим моментом/метод регулировки скорости с замкнутым

Это использование PLC управляет двигателем по аналоговому сигналу к двигателю и управляет пусковым запуска двигателя и положительным и обращает вспять через реле/переключатель.COM привода подключен к реле ПЛК и сигнал симуляции; положительный перевод соответственно и изменение;
6. Метод управления положением импульсного сигнала ПЛК
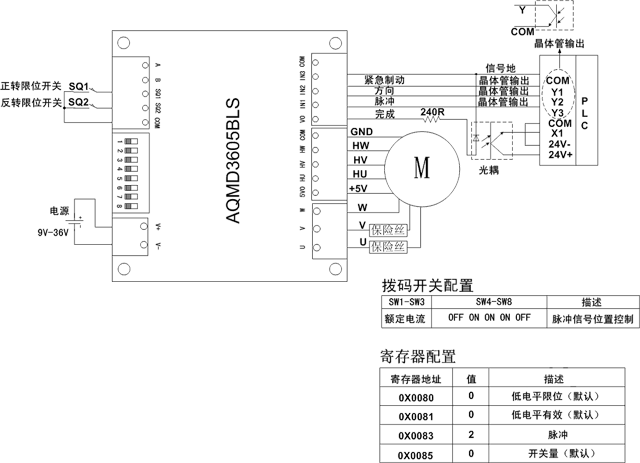
Это использование может быть достигнуто в ПЛК через импульсный сигнал для управления положением вращения двигателя.Типичный метод комплексного соединения, управляемый положением импульсного сигнала ПЛК, показан на рисунке 5.12.COM привода соединяет пол сигнала ПЛК; Порт VO водителя соединяет сопротивление 240 евро, и между Vo и Com и PLC X1 и 24V+подключен оптокуплер для вывода сигнала завершения, чтобы уведомить процесс управления позицией ПЛК.Ограниченный переключатель SQ1 и SQ2 имеют ограниченные позиции и обратные позиции, соответственно.
7.485 Метод управления мульти -мачином связи

485 линейка связи каждого водителя подключена к основной станции 485 параллельно в виде A-A-A и B-B. Главная станция 485 работает независимо для каждого водителя через адрес станции, настроенный приводом.Адрес каждого настройки драйвера должен быть уникальным и не может повторяться с другими драйверами.
Адрес загрузки информации: http://akelc.com/download/show_70.html
Прикрепите ПК, чтобы показать пример программы, которая может использоваться для отладки двигателя, конфигурации параметров или вторичной разработки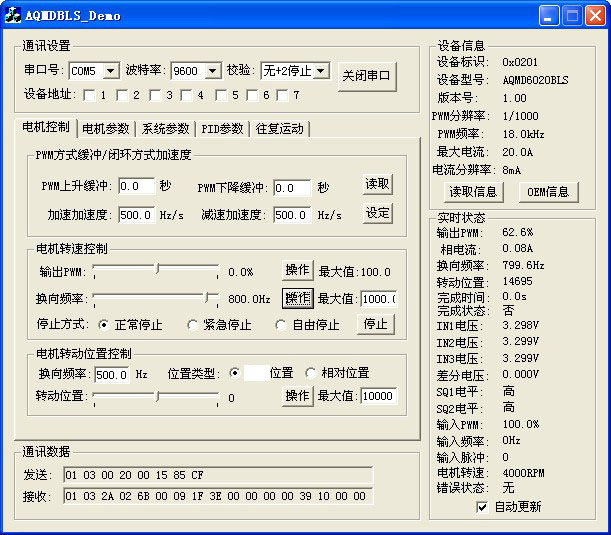
- Программное обеспечение Использование ручного адреса:http://akelc.com/download/show_74.html
- Если вам нужно использовать диск PC 485 Communication, вам следует использовать ПК и диск конвертации 232-485 или USB-485
Упаковка с двигателем
| Модель | Оцененное напряжение V. | Рейтинг крутящий момент нм | Оценка скорости оборотов | Оценка мощности w | Рейтинг ток а | Чрезвычайно число | Скорость нагрузки воздушной нагрузки RPM | Ток воздушной нагрузки |
| AK57BL55-230-035 | 24 | 0.11 | 3000 | 35 | 2.4 | 4 | 4200 | 0.3 |
| AK57BL55-230-060 | 24 | 0.18 | 3000 | 60 | 3 | 4 | 4800 | 0.35 |
AK57BL55-230-035 Диаграмма размера двигателя

AK57BL55-230-060Карта размера двигателя

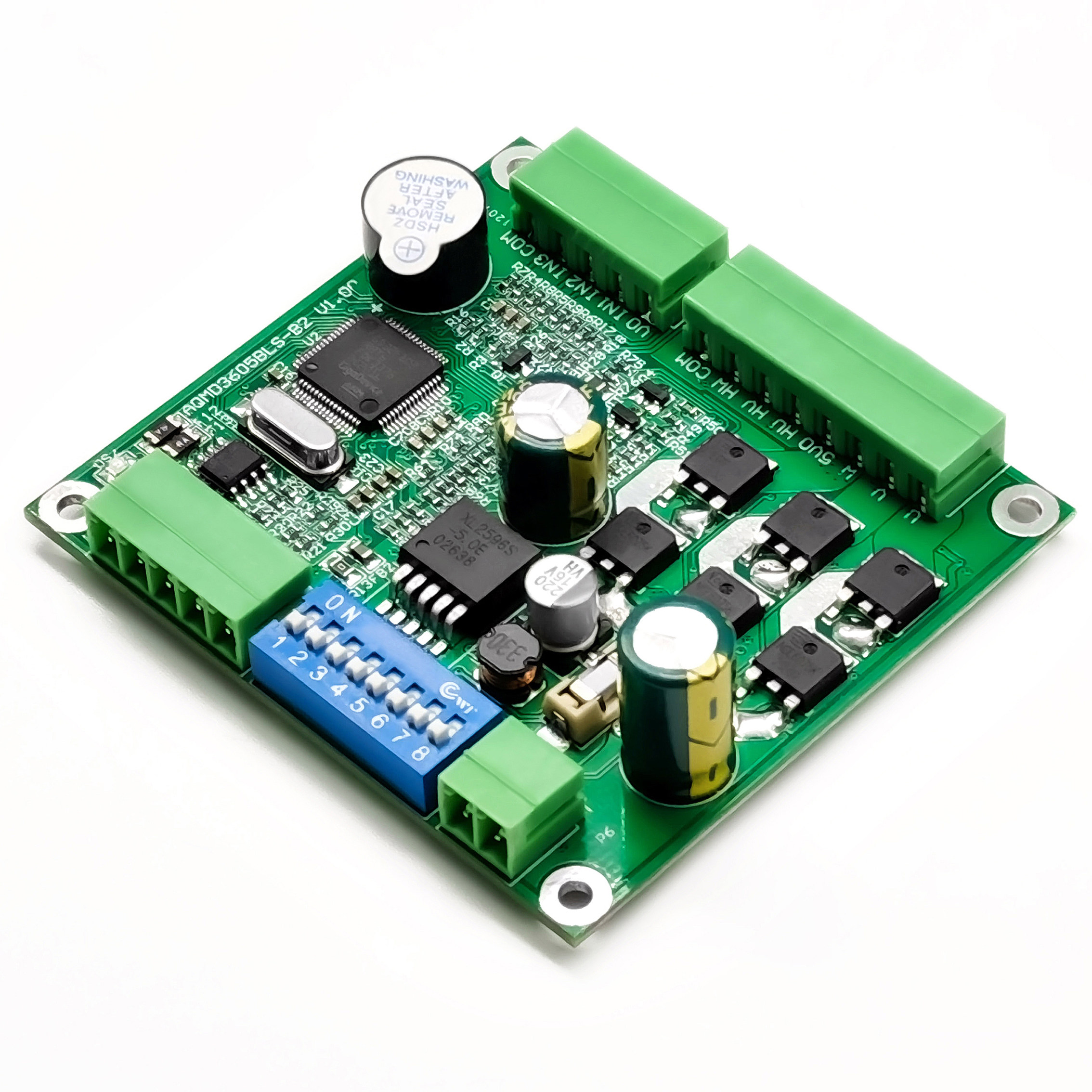
Привести к внутренней структуре
1. Передняя структура водителя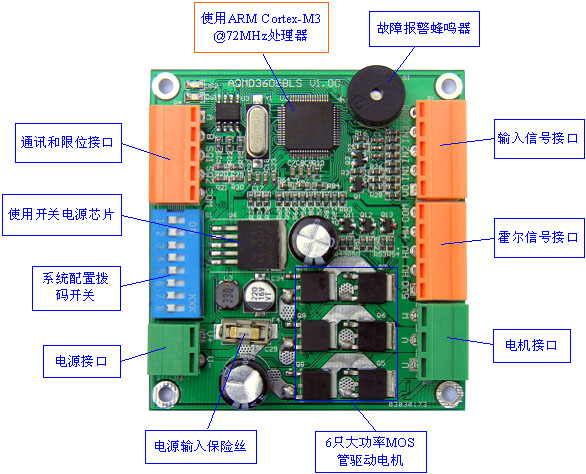
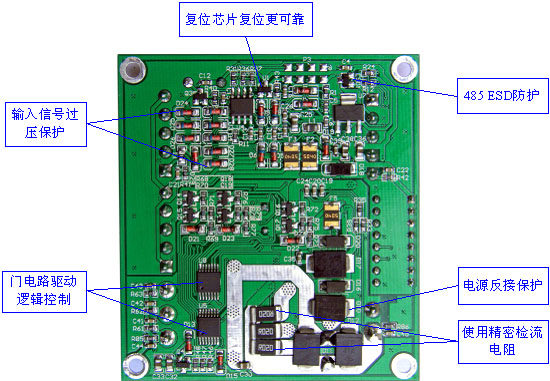
2.Вернуть структуру
Определение

- Размер драйвера 70 мм×65mm×21 мм.Расстояние между пор составляет 3 мм, а расстояние от сердца в сторону в сторону составляет 3,4 мм.
Приложение: AQMDXXXXBLS Серия Ссылка на выбор драйвера двигателя