Визуальная лекция шестнадцать лекций от теоретических до практики второго издания+визуального машинного обучения 20 Лекции по компьютерному редактированию программы дизайнерские книги.





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара





E1 9787302397922 9787121369421 Две вещи 999225
Этот набор книг разделен на следующие книги. Если вам нужно купить одну книгу, нажмите на ссылку ниже:
Визуальное машинное обучение 20 Лекция 9787302397922 Цена: 49,00 юаней.
Визуальное слэм 14 Лекция: от теоретической до практики (2 издание) 9787121369421 Цена: 108,00

Название: Визуальное машинное обучение 20 лекций
Цена: 49,00 юаней.
Пресса: издательство Tsinghua University Press
ISBN: 9787302397922
Упаковка: Тихий океан
Открыто: 16
Бумага: пластическая версия бумага
Количество страниц: 239

«20 Лекций по визуальному машинному обучению»-это монография о направлении компьютеров, автоматизации, информации, электроники и коммуникации. Он вводит K-средние, KNN Learning, регрессионное обучение, обучение дерева решений, Randomforest Adaboost, SVM-методы, улучшенное обучение , надувное обучение, обучение RBF, разреженное представление, обучение словаря, обучение BP, обучение CNN, обучение RBM, глубокое обучение, генетический алгоритм, методы муравья и другие основные теории; в -диптом объяснение алгоритмов визуального машинного обучения и методов оптимизации и экспериментального моделирования; ; систематически суммировал свои преимущества и недостатки.
Эта книга придает большое значение тому, как органично сочетать теорию и практику алгоритмов визуального машинного обучения для решения многих основных проблем в области визуального машинного обучения. Она может применяться к медицинскому анализу изображений, промышленной автоматизации, робототехнике, беспилотным автомобилям, лицом к лицу. Обнаружение и распознавание и распознавание. Идентификация информации о транспортном средстве, обнаружение и идентификация поведения, интеллектуальное видео наблюдение и т. Д.Эта книга придает большое значение типичности и реализации алгоритма. Она включает в себя как классические алгоритмы в искусстве, так и результаты исследований в искусстве.
Эта книга может быть использована не только в качестве старших учебников по бакалавриату и выпускникам, но и чрезвычайно полезным справочным материалом в области визуального машинного обучения.

Введение
1 Разговор о K-средних
1.1 Основной принцип
1.2 Улучшение алгоритма
1.3 Эксперимент по моделированию
1.4 Характеристики алгоритма
2 разговор о KNN Learning
2.1 Основной принцип
2.2 Улучшение алгоритма
2.3 Эксперимент по моделированию
2.4 Особенности алгоритма
3 лекции возвращаются к обучению
3.1 Основной принцип
3.1.1 Возврат параметра
3.1.2 непараметтра регрессии
3.1.3 Половина возврата
3.2 Улучшение алгоритма
3.2.1 Модель линейной регрессии
3.2.2 Модель полиномиальной регрессии
3.2.3 Основная модель регрессии компонента
3.2.4
3.2.5 Модель ядерной регрессии
3.3 Эксперимент по моделированию
3.3.1 Вернуться к процессу обучения
3.3.2 Извлечение прямой края на основе регрессионного обучения
3.3.3 Интерполяция изображения на основе регрессионного обучения
3.4 Особенности алгоритма
4 лекция по обучению дерева решений
4.1 Основной принцип
4.1.1 Классификация и кластеризация
4.1.2 Дерево решений
4.1.3 Стандарты измерения для получения информации
4.1.4 Антитропия получения информации о необходимости измерения ожиданий уменьшается
4.1.5 Пессимистическая ошибка разрезает Pep Pep
4.1.6 Алгоритм основного решения
4.2 Улучшение алгоритма
4.2.1 Алгоритм ID3
4.2.2 C4.5 Алгоритм
4.2.3 Алгоритм SLIQ
4.2.4 Алгоритм спринта
4.3 Эксперимент по моделированию
4.3.1 Алгоритм ID3 для обучения логическим функциям для псевдо -кода
4.3.2 C4.5 Псевдо -код построенного дерева решений
4.4 Характеристики алгоритма
5 Лекция Случайное обучение лесов
5.1 Основной принцип
5.1.1 Дерево решений
5.1.2 Интегрированное обучение мешков
5.1.3 Метод случайного леса
5.2 Улучшение алгоритма
5.3 Эксперимент по моделированию
5.3.1 Процесс классификации и регрессии случайных лесов
5.3.2 Forest-Ri и Forest-RC
5.3.3 Оценка осанки Случайного леса
5.4 Характеристики алгоритма
6 Изучение лекции Байеса
6.1 Основные принципы
6.2 Улучшение алгоритма
6.2.1 Простая байесовская модель
6.2.2 Уровень байесовской модели
6.2.3 Добавлена байесовская модель обучения
6.2.4 Просто байесовская модель на основе технологии повышения
6.2.5 модель байесовской нейронной сети
6.3 Эксперимент по моделированию
6.3.1 Learn_Bayse(X,V)
6.3.2 Classify_Bayse(X)
6.4 Характеристики алгоритма
7 разговор об алгоритме EM
7.1 Основные принципы
7.2 Улучшение алгоритма
7.2.1 Быстрый расчет алгоритма EM
7.2.2 Выбор неизвестных функций распределения
7.2.3 Улучшение конвергенции алгоритма EM
7.3 Эксперимент по моделированию
7.3.1 Процесс алгоритма EM
7.3.2 Псевдод кода алгоритма EM
7.3.3 Гибридная модель приложения Amplicathm-Gauss
7.4 Характеристики алгоритма
8 Лекция Adaboost
8.1 Основные принципы
8.1.1 Метод повышения
8.1.2 Метод Adaboost
8.2 Улучшение алгоритма
8.2.1 Улучшение прав и методов обновления стоимости
8.2.2 Adaboost Параллельный алгоритм
8.3 Эксперимент по моделированию
8.3.1 Процесс реализации алгоритма Adaboost
8.3.2 Пример алгоритма Adaboost
8.4 Характеристики алгоритма
8.4.1 Преимущества алгоритма Adaboost
8.4.2 Недостатки алгоритма Adaboost
9 Лекция метод SVM
9.1 Основные принципы
9.2 Улучшение алгоритма
9.3 Эксперимент по моделированию
9.4 Характеристики алгоритма
10 лекций по улучшению обучения
10.1 Основные принципы
10.2 Улучшение алгоритма
10.2.1 Некоторые модели восприятия
10.2.2 Улучшите функцию функции в обучении
10.2.3 Слоистое улучшенное обучение
10.2.4 Multi -Agent Enhanced Learning Learning
10.3 Эксперимент по моделированию
10.4 Характеристики алгоритма
11 лекций по формированию обучения
11.1 Принцип алгоритма
11.1.1 ISOMAP
11.1.2 LLE
11.1.3 LE
11.1.4 HE
11.2 Улучшение алгоритма
11.2.1 LPP
11.2.2 MFA
11.3 Моделирование алгоритма
11.4 Характеристики алгоритма
12 Лекция RBF Learning
12.1 Основные принципы
12.1.1 Метод внутренней вставки на основе функции RBF
12.1.2 Нейронная сеть RBF
12.1.3 Метод расчета центра обработки данных
12.2 Улучшение алгоритма
12.2.1 Улучшение проблемы полностью внутренних задач вставки
12.2.2 Метод улучшения для неподходящих вопросов
12.2.3 в целом нейронная сеть RBF
12.3 Эксперимент по моделированию
12.3.1 Обучение RBF на основе гауссовой функции
12.3.2 Процесс алгоритма обучения RBF
12.4 Характеристики алгоритма
13 говорящее разреженное представление
13.1 Основные принципы
13.1.1 Сигнальное разреженное представление
13.1.2 Алгоритм решений для поиска жадного
13.1.3 Метод решения выпуклой оптимизации
13.2 Улучшение алгоритма
13.2.1 Комбинация Лассо (Группа Лассо)
13.2.2 смешанный лассо (слитый лассо)
13.2.3 Эластичная сеть
13.3 Эксперимент по моделированию
13.3.1 Алгоритм OMP
13.3.2 Алгоритм APG
13.3.3 Признание лица на основе редких выражений
13.4 Характеристики алгоритма
13.4.1 равные преимущества
13.4.2 Алгоритм недостатки
14 Lecture Dictionary Learning
14.1 Основные принципы
14.2 Улучшение алгоритма
14.2.1 Отличный метод направления (MOD)
14.2.2 Метод K-SVD
14.2.3 Метод обучения онлайн -словарю
14.3 Эксперимент по моделированию
14.3 Видеоизображения на основе словаря обучения изображений. Методы снижения шума
14.4 Характеристики алгоритма
14.4.1 равные преимущества
14.4.2 Алгоритм недостатки
15 лекций BP Learning
15.1 Основные принципы
15.1.1 Искусственная нейронная сеть
15.1.2
15.2 Улучшение алгоритма
15.2.1 Улучшение уровня обучения
15.2.2 Улучшить образец тренировок
15.2.3 Улучшение функции потерь
15.2.4 Улучшение метода соединения
15.3 Эксперимент по моделированию
15.4 Характеристики алгоритма
16 Лекция CNN Learning
16.1 Основные принципы
16.1.1 Модель нейрогентивной машины нейровой когнитивной машины
16.1.2 Algorithm CNN мысль мысли
16.1.3 Структура сети CNN
16.1.4 CNN Network Learning
16.2 Улучшение алгоритма
16.2.1 Разработка новая стратегия обучения нейронной сети.
16.2.2 Использовать процесс работы свертывания ускорения графического процессора
16.2.3 Используйте параллельные вычисления для улучшения сетевого обучения и скорости тестирования
16.2.4 Используйте распределенные вычисления для улучшения сетевого обучения и скорости тестирования
16.2.5 Аппаратная и сверточная нейронная сеть
16.3 Эксперимент по моделированию
16.3.1 Моделирование алгоритма обучения сверточной нейронной сети
16.3.2 Пример приложения сверточных нейронных сетей
16.4 Характеристики алгоритма
16.4.1 Outlook Преимущества
16.4.2 Алгоритм недостатки
17 Лекция RBM Learning
17.1 Основные принципы
17.1.1 RBM обучающая мысль
17.1.2 RBM Model Foundation
17.1.3 RBM Model Learning
17.2 Улучшение алгоритма
17.2.1 квадратная разница RBM
17.2.2 Средняя дисперсия RBM
17.2.3 Sparse RBM
17.2.4 Sparse Group RBM
17.2.5 Классификация RBM
17.3 Эксперимент по моделированию
17.4 Характеристики алгоритма
17.4.1 Outlook Преимущества
17.4.2 Алгоритм недостатки
18 лекций глубокое обучение
18.1 Основные принципы
18.2 Улучшение алгоритма
18.3 Эксперимент по моделированию
18.4 Характеристики алгоритма
19 Лекция по генетическому алгоритму
19.1 Принцип алгоритма
19.2 Улучшение алгоритма
19.2.1 Дизайн функции адаптации
19.2.2 Выбор начальной группы
19.3 Моделирование алгоритма
19.3.1 Предварительная обработка изображения
19.3.2 Выбор функций номерного знака
19.3.3 позиционирование номерного знака на основе генетических алгоритмов
19.4 Характеристики алгоритма
19.4.1 Преимущества генетических алгоритмов
19.4.2 Недостаточно генетического алгоритма
20 Выступающие методы колонии муравья
20.1 Основные принципы
20.1.1 Групповой интеллект
20.1.2 Поиск муравья для методов источника пищи
20.1.3 Правила алгоритма Акунии
20.1.4 Внедрение алгоритмов колоний муравьев
20.2 Улучшение алгоритма
20.2.1 Алгоритм генов на основе генов
20.2.2 Система колоний муравьев
20.2.3 Система элитных муравьиных воротничков
20.2.4 Система Antonfunction
20.2.5 Сортировка системы муравьев колоний
20.2.6 Отличная дифференциальная система муравьев
20.3 Эксперимент по моделированию
20.3.1 Примеры алгоритма Aqunon
20.3.2 Реализация алгоритма Акунии
20.3.3 Алгоритм Акюнона псевдод
20.4 Характеристики алгоритма
Название: Визуальная шестнадцать лекций: от теоретического до практики (2 издание)
Цена: 108,00
Пресса: электронная промышленная пресса
Издание: 1 издание
Время публикации: июль 2019 г.
Открыто: 16
Автор: Гао Сян и т. Д.
Рамки: pingpo le
Код ISBN: 9787121369421
Эта книжная система вводит базовый алгоритм знаний и основного, необходимый для визуального удара (в то же время позиционирование и построение карты). Просмотреть геометрию, обнаружение возврата петли и т. Д.Кроме того, мы также предоставляем большое количество кода экземпляра для читателей для изучения и исследования, чтобы более глубоко овладеть этим содержанием.Эта книга может использоваться в качестве материала для самоуверенного входа для исследователей, заинтересованных в SLAM, и ее также можно использовать в качестве учебника, связанного с студенческим студенческим или выпускником.
Оглавление
1 лекция для подготовки знаний .. 1
1.1 Что сказать в этой книге. 1
1.2 Как использовать эту книгу. 3
1.2.1 Метод организации 3
1.2.2 Код. 5
1.2.3 Читатель для -. 6
1.3 Стиль согласился 6
1.4 Спасибо и заявление. 8
1 часть математической основы 10
2 Давайте поговорим о Slam11
2.1 Выход: пример небольшой редьки 13
2.2 Классическая структура визуального шлема. 19
2.2.1 Измеритель визуального пробега. 20
2.2.2. Оптимизация.
2.2.3 Кольцовый тест 22
2.2.4 Рисунки. 23
2.3 Математическое выражение задачи хлома. 24
2.4 Практика: базис программирования 27
2.4.1 Установите операционную систему Linux. 27
2.4.2 Hello SLAM 29
2.4.3 Используйте Cmake. 30
2.4.4 Используйте библиотеку. 32
2.4.5 Используйте IDE 35
3 讲 三 维 空间 刚体 运动 ...
3.1 вращающаяся матрица 42
3.1.1 баллы, векторы и координаты 42
3.1.2 ЕС по системе координат 43
3.1.3 Изменить матрицу и координаты QIQI 46
3.2 Практика: собственное 47
3.3 Вращающийся вектор и угол Эйлера. 53
3.3.1 Вращающийся вектор 53
3.3.2 Euler Jiao. 54
3.4 четыре юань. 56
3.4.1 Определение четырех юаней 56
3.4.2 Работа четырех юаней 57
3.4.3 Используйте четыре юаня, чтобы указать вращение 59
3.4.4 Четыре юаня в другое преобразование представления вращения. 59
3.5 * Похоже, имитация, стрельба, стрельба. 61
3.6 Практика: геометрический модуль собственного 62
3.6.1 Демонстрация данных о геометрическом модуле собственного.
3.6.2 Пример фактического преобразования координат 64
3.7 Визуальная демонстрация. 66
3.7.1 Показать спортивную траекторию 66
3.7.2 Показать положение камеры. 69
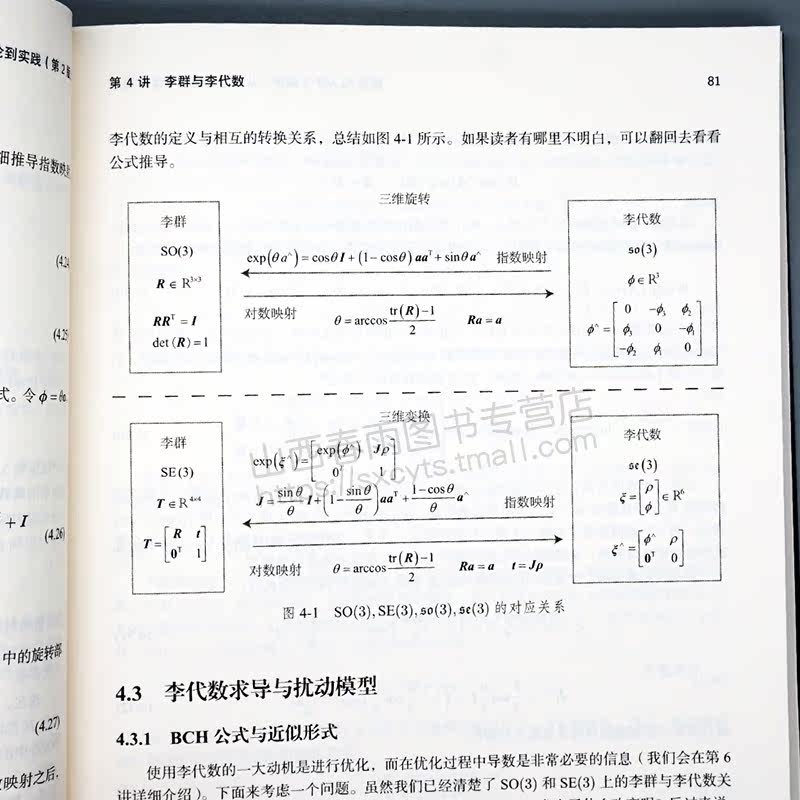
4 讲 李群 与 李代数 ...
4.1 Основа Ли Кун и Ли Дай. 73
4.1.1 Группа 73
4.1.2 Lee Dai Numen цитата 74
4.1.3 Определение Li Daiwhan 76
4.1.4 Li Dai Номер SO (3). 76
4.1.5 li dai number se (3). 77
4.2 Индекс и сопоставление пары 78
4.2.1 Индексное отображение на SO (3). 78
4.2.2 Индексное отображение на SE (3). 80
4.3 Li Daiqi Модель и нарушение. 81
4.3.1 Формула BCH и приблизительная форма. 81
4.3.2 Li Daixu на SO (3) Направление 83
4.3.3 Li Dai Quine Director. 84
4.3.4 Модель нарушения (слева) 85
4.3.5 Li Daixu на SE (3) ищет руководство 85
4.4 Практика: Софис 86
4.4.1 Основное использование Sophus 86
4.4.2 Пример: оценка траектории оценки. 89
4.5 * Аналогичная группа трансформации и номер Li DAI 92
4.6 Резюме. 93
5 лекционная камера и изображение 95
5.1 Модель камеры 97
5.1.1 модель камеры -пайф 97
5.1.2 Модель раскрытия 100
5.1.3 Модель камеры с двойной эйорией 103
5.1.4 RGB-D Camera Model 104
5.2 Изображение. 106
5.3 Практика: изображение на компьютере. 107
5.3.1 Основное использование OpenCV 107
5.3.2 Удаление изображения. 112
5.4 Практика: 3D Vision 113
5.4.1 Двойные глаза Visual 113
5.4.2 RGB-D Visual. 115
6 Живая нелинейная оптимизация 119
6.1 Проблема оценки статуса. 121
6.1.1 Оценка статуса пакетного состояния и оценка проверки с большой пост -линейкой. 121
6.1.2 Первые два сделают свинец. 123
6.1.3 Пример: оценка статуса партии 125
6.2 Нелинейная маленькая трилита 126
6.2.1 Первый метод градиента второго порядка 127
6.2.2 Гаусс Ньютоновский Метод. 128
Справочник VII
6.2.3 Левинберг—Метод МакКеля 130
6.3 Практика: проблема подгонки кривой 132
6.3.1 Рукописный гауссовый ньютоновский метод. 132
6.3.2 Используйте Ceres, чтобы соответствовать кривой 136
6.3.3 Используйте G2O, чтобы соответствовать кривой. 141
6.4 Резюме. 148
2 Часть практических приложений 150
7 讲 视觉 里程 计 1. ...
7.1 Метод пункта 153
7.1.1 Особенности. 153
7.1.2 Особенности ORB. 155
7.1.3 Match 158
7.2 Практика: извлечение и совпадение. 159
7.2.1 Особенности Orb OpenCV. 159
7.2.2 Функции шержа почерка 162
7.2.3 Движение камеры 165
7.3 2d? 2d: Extreme Geometric. 165
7.3.1 Чрезвычайно ограничен 165
7.3.2 Основная матрица 168
7.3.3 Сингл соответствующая матрица 170
7.4 Практика: Решите движение камеры для крайних ограничений. 172
7.5 Измерение треугольника 177
7.6 Практика: измерение треугольника 178
7.6.1 Код измерения треугольника 178
7.6.2 Обсуждение. 179
7.7 3d? 2d: Pnp. 180
7.7.1 Прямое линейное преобразование 180
7.7.2 P3P 182
7.7.3 Миниатюризованная ошибка тяжелой проекции для решения PNP. 184
7.8 Практика: решить PNP 188
7.8.1 Используйте EPNP, чтобы найти решение. 188
7.8.2 Оценка рукописного положения 189
7.8.3 Используйте G2O для оптимизации Ba. 191
7.9 3d? 3d: Icp. 196
7.9.1 Метод SVD. 196
7.9.2 Метод нелинейного оптимизации. 198
7.10 Практика: решить ICP. 199
7.10.1 Практика: метод SVD 199
7.10.2 Практика: метод не -линейной оптимизации. 201
7.11 Резюме. 203
8 讲 视觉 里程 计 2.
8.1 Прямой метод лидерство. 207
8.2 2D Light Flow 208
8.3 Практика: LK Light Stream. 210
8.3.1 Используйте LK Light Flow 210
8.3.2 Используйте Гауссовый Ньютон для достижения света. 211
8.3.3 Резюме практики светового потока 218
8.4 Прямой закон. 218
8.4.1 Направление прямого метода 218
8.4.2 Обсуждение прямого права 221
8.5 Практика: прямой закон. 221
8.5.1 Одиночный прямой метод. 221
8.5.2 Multi -Layer Direct Method. 226
8.5.3 Обсуждение результатов 227
8.5.4 Прямые французские преимущества и недостатки Резюме 230
9 бэкэнд лекций 1 ...... 232
9.1 Обзор. 234
9.1.1 Оценка статуса объяснение вероятности объяснения 234
9.1.2 Линейная система и Kf. 236
9.1.3 Не -линейная система и EKF. 239
9.1.4 Обсуждение EKF 241
9.2 BA и оптимизация фигуры. 242
9.2.1 Проекционная модель и функция стоимости BA 242
9.2.2 BA раствор 243
9.2.3 SPARENESS и маргинализация. 245
9.2.4 Основная функция списка. 251
9.3 Практика: Ceres BA 253
9.3.1 Набор данных BAL 253
9.3.2 Написание CERES BA 253
9.4 Практика: решение G2O Ba. 257
9.5 Резюме. 263
10 лекция задняя часть 2 ...... 265
10.1 Раздвижной оконная фильтрация и оптимизация 266
10.1.1 Структура BA в фактической среде. 266
10.1.2 Метод скользящего окна. 267
10.2 Pic. 270
10.2.1 Значение карты жестов 270
10.2.2 Оптимизация позиции 270
10.3 Практика: оптимизация карты позиции. 272
10.3.1 Нативная позиция G2O Рисунок 272
10.3.2 Оптимизация карты позиции в Li Dai. 277
10.3.3 Резюме. 282
11 лекций обратно к обнаружению кольца .. 283
11.1 Обзор. 285
11.1.1 значение обнаружения круглого кольца. 285
11.1.2 Метод обнаружения кольцевой дороги. 286
11.1.3 Точность и скорость отзыва. 287
11,2 CI Bag Model 289
11.3 Словарь. 291
11.3.1 Структура словаря. 291
11.3.2 Практика: создать словарь. 292
11.4 Расчет сходства. 295
11.4.1 Теоретическая часть 295
11.4.2 Практика: расчет сходства 296
11.5 Экспериментальный анализ и комментарий 300
11.5.1. Увеличьте масштаб словаря 300
11.5.2 Лечение оценки сходства 302
11.5.3 Обработка ключевых кадров 302
11.5.4 Проверка после тестирования. 303
11.5.5 Отношения с машинным обучением 303
12 лекций для строительства картин ....... 305
12.1 Обзор. 306
12.2 Единственная плотная реконструкция. 308
12.2.1 Stereo Vision 308
12.2.2 Поиск полярной линии и сопоставление блоков 309
12.2.3 Глубокий фильтр, распределенный Гауссом. 311
12.3 Практика: одиночная плотная реконструкция 314
12.3.1 Экспериментальный анализ и обсуждение. 323
12.3.2 Проблема градиента пикселя. 324
12.3.3 обратная глубина. 325
12.3.4 Изменение между изображениями 326
12.3.5 Параллелизация: проблема эффективности 327
12.3.6 Другие улучшения. 327
12.4 RGB-D плотно построенная картинка. 328
12.4.1 Практика: карта облака точек. 328
12.4.2 от Dianyun Reconstruction Grid. 333
12.4.3 Карта дерева осьминога. 336
12.4.4 Практика: карта дерева олишаба 338
12,5 * TSDF MAP и Fusion Series 340
12.6 Резюме. 343
13 讲 实践 : 设计 SLAM 系统 ...
13.1 Почему это отдельно перечислено в инженерной главе 346
13.2 Инженерная структура 347
13.3 Реализация. 349
13.3.1 Реализация базовой структуры данных 349
13.3.2 Фронт. 354
13.3.3 Бэк -энд. 357
13.4 Экспериментальный эффект 361
14 лекционных ударов: настоящее и будущее ...
14.1 Текущая схема с открытым исходным кодом 364
14.1.1 MonoSLAM 364
14.1.2 PTAM 365
14.1.3 ORB-SLAM 366
14.1.4 LSD-SLAM. 369
14.1.5 SVO. 370
14.1.6 RTAB-MAP. 371
14.1.7 Другие. 372
14.2 Темы Future Slam 372
14.2.1 Vision + инерционная навигационная навигация. 373
14.2.2 Семантический удар. 374
14.2.3 Будущее шлема 375
附录 a 高斯 的 性质 性质 ...
Приложение B Matrix Seek ... 380
Приложение C ros inpit. 382
Использованная литература...............