Серия военных высокотехнологичных знаний. Беспилотная боевая система, применение разведывательного оборудования, совместные операции, командование и контроль, интеллектуальная игра, военная информация, раннее предупреждение, военное управление, навигация, позиционирование, средства электронного противодействия, сетевые технологии защиты.




Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара






Книга входа беспилотника   48,0 Юань
Пресс: Шандунсский издательство народного дома; 1 -е издание (1 марта 2017 г.)
Бумага: 188 страниц
Язык: упрощенный китайский
Кайбен: 16
Штриховой код: 9787209092791
Размер товара: 24 х 16,6 х 1,2 см
Вес товара: 358 г
Эта книга разделена на 5 глав.
1: Расскажите определение дронов и введите несколько уникальных дронов.
2: Первоначально вводится состав системы беспилотников, разница между многопрофильными беспилотниками и фиксированными беспилотниками и применением дронов.
3: Подробное введение в платформу корпуса, систему питания, навигационную и систему управления, систему ссылок, система нагрузки и систему наземной станции беспилотника.Он также содержит детали дизайна и методы обнаружения некоторых беспилотников.
4: С точки зрения принципов полета, режима полета, среды полета, мер предосторожности и обучения в области полета, проанализируется подробно анализируется бегство беспилотников; Кроме того, он также включает в себя связанный контент, связанный с законами и положениями о некоторых образовании беспилотников и механизмы беспилотников.
5: В основном он представляет, как сделать DIY многомоторный беспилотник.
Введение в технологию беспилотников   49,8 Юань
Принцип беспилотного состава и работы единиц, случаев применения и навыков работы, сканируйте код, чтобы увидеть 29 случаев применения
Автор: Цзя Хангдан
Пресса: машинная индустрия Пресса Время публикации: июнь 2018 г.
Книга: 16
ISBN: 9787111600169
Эта книга в основном вводит основные компоненты беспилотников (беспилотники с фиксированным крылом, беспилотные вертолеты, многоотролые беспилотники) и связанных с ними сценариев практического применения. Груз, защита растений, спасение, военные упражнения, осмотр и т. Д., А также метод дрона и спортивная конкуренция и анти -обработка, используйте методы иллюстрации во время внедрения, чтобы отразить исследования и фактические практические исследования в области беспилотников в последние годы в Китае. В большом количестве примеров результаты применения позволяют читателям иметь четкое понимание беспилотников.Эта книга оснащена 29 QR -кодами. Код сканирования может напрямую смотреть приложения для дронов.Книга легко понять, графика полон графики, читаемость и практичность сильны. Она может использоваться в качестве учебника для майоров беспилотников в профессиональных школах, технических колледжах и книгах для учебных заведений беспилотников. Ссылка.
Четвертый ротор беспилотный дизайн самолетов   39,0 Юань
Пресса: издательство Tsinghua University Press; 1 -е издание (1 июня 2017 г.)
Бумага: 128 страниц
Язык: упрощенный китайский
Кайбен: 16
Шатрикод: 9787302467359
Размер товара: 23,6 х 18,4 х 0,8 см
Товарный вес: 259 г
Четырех осевой самолет -это беспилотный самолет и умный робот.“ четыре оси” относится к мощности самолета, предоставленного 4 летными двигателями ротора.Люди участвуют в исследовательских и коммерческих областях четырех осевых самолетов.В последние десятилетия, с разработкой современной теории управления и технологии электронного управления, использование современной технологии управления, используя двигатели вместо нефтяных двигателей для четырех осевых исследований по управлению самолетами.В этой книге используется микропроцессорная платформа серии STM32, чтобы объяснить проектирование четырех осевых самолетов из проектирования схемы проектирования, выбора устройства и отладки кода. Дизайн.Эта книга может быть использована в качестве справочника для связанных специальностей, таких как электроника, общение и контроль, или техническая справочник для смежного технического персонала.




"Книга входа в беспилотник"
1. Подробное объяснение шести основных систем и применений беспилотников, различия многототорных и фиксированных крыльев под множеством углах, комплексная диаграмма производства DIY и игроки должны знать меры предосторожности.
2. Независимо от того, кто вы, вы можете легко овладеть новым навыком.Цветная карта плюс прозрачные шаги, простые в изучении и простые в использовании!
3. Приложение хорошо известных Drone Media and Forums в Китае, чтобы мгновенно реализовать обмен информацией.
об авторе
Zhao Yunchao: окончил школу автоматизации Нанкинского университета аэронавтики и астронавтики в 2010 году.Он работал в третьем исследовательском институте Китая аэрокосмическая наука и отраслевая группа и государственное агентство в провинции Гуандун, чтобы участвовать в общем дизайне многооттротных беспилотников.Начиная с бизнеса в апреле 2016 года, занимаясь профессиональным образованием беспилотников и молодежным научным и технологическим образованием.
Чжэн Ю: бакалавриат Школы автоматизации Нанкинского университета аэронавтики и астронавтики много раз учится&Ldquo; Avic Industrial Cup”&Ldquo; национальная аэрокосмическая модель чемпионата”&Ldquo; национальный конкурс инноваций в машинах” подождите награду в мероприятии.В 2016 году он выиграл Университет аэронавтики и астронавтики Нанкин&Ldquo; орден президента Тонга”.В 2017 году он получил квалификацию для аспирантуры Пекинского университета аэронавтики и астронавтики.
Оглавление
Предисловие / 1
Предисловие / 3
Глава 1 ближе к БПЛА
Мечтает, когда молодой / 1
Эльф в небе / 2
Глава 2 Обзор системы БПЛА
Раздел 1 Обзор системы многооттротных беспилотников / 9
Раздел 2 Обзор системы беспилотников с фиксированным крылом / 20
Раздел 3 Разница между мульти -ротором и фиксированным крылом / 23
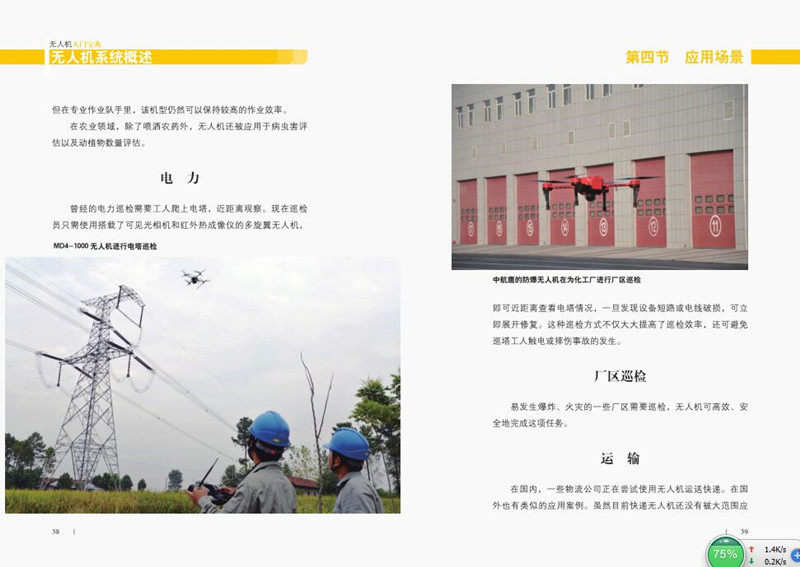
Раздел 4 Сцена приложения / 35
Глава III подробное объяснение системы беспилотников
РАЗДЕЛ 1 ПЛАТПИЦА ТЕБЯ / 41
Раздел 2 Система питания / 59
Система навигации и управления разделом 3 /86
Раздел 4 Система ссылок / 95
Раздел 5 Система загрузки / 101
Раздел 6 Система наземной станции / 103
Глава 4 Полет беспилотника
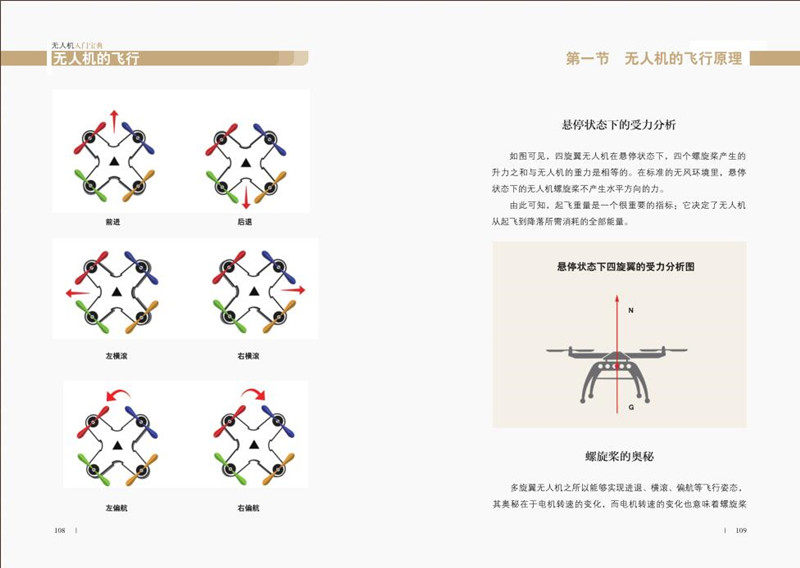
Раздел 1 Принципы полета / 107
Раздел 2 Режим полета / 125
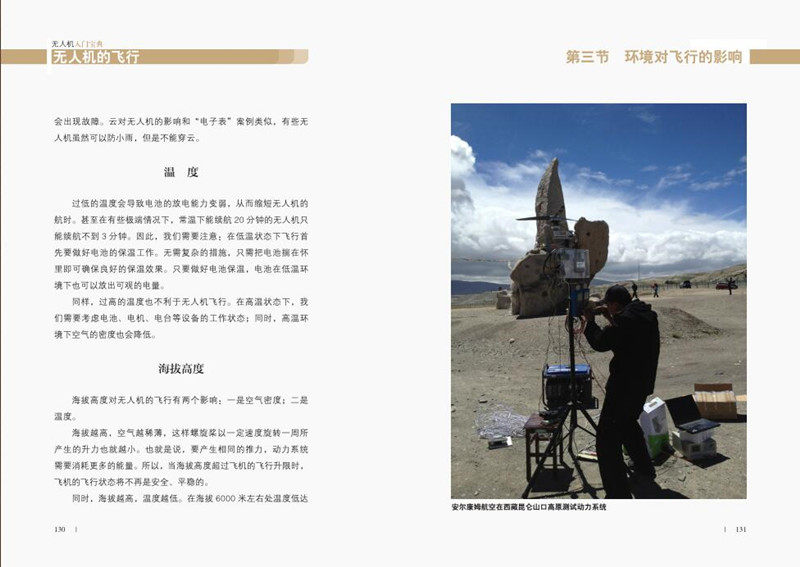
Раздел 3 Влияние окружающей среды на полете / 128
Раздел 4 Меры предосторожности / 134
Раздел 5 Обучение навыков полета / 137
Раздел 6 Культивирование профессиональных талантов / 150
Раздел 7 Связанные законы и правила / 151
Глава 5 DIY много -роторного беспилотника
Раздел 1 подготовка / 153
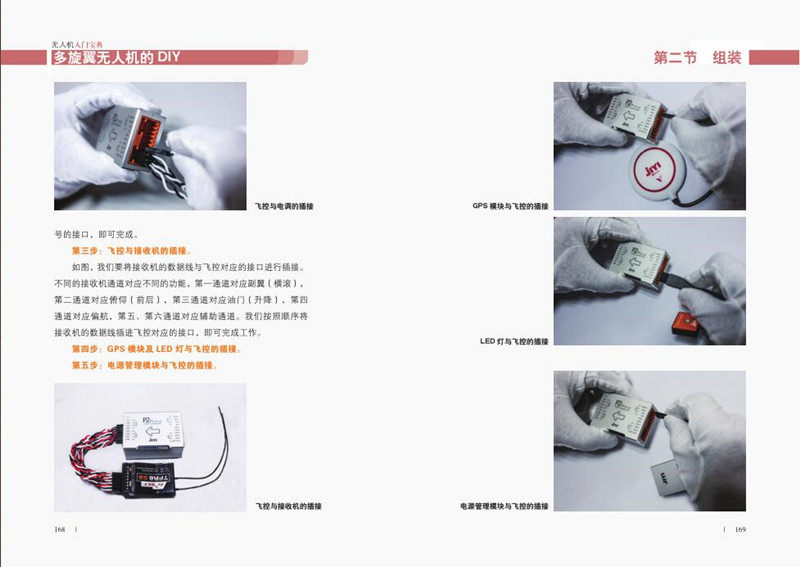
Раздел 2 сборка / 165
Третья отладка / 173
Раздел 4 испытательный рейс / 173
Профессиональный анализ / 177
Внутренняя скважина -известные Drone Media, Forum / 182
………………………………………………………………………………………………………………………………………………………
"Введение в технологию БПЛА"Эта книга в основном вводит основные компоненты беспилотников (беспилотники с фиксированным крылом, беспилотные вертолеты, многоотролые беспилотники) и связанных с ними сценариев практического применения. Груз, защита растений, спасение, военные упражнения, осмотр и т. Д., А также метод дрона и спортивная конкуренция и анти -обработка, используйте методы иллюстрации во время внедрения, чтобы отразить исследования и фактические практические исследования в области беспилотников в последние годы в Китае. В большом количестве примеров результаты применения позволяют читателям иметь четкое понимание беспилотников.Эта книга оснащена 29 QR -кодами. Код сканирования может напрямую смотреть приложения для дронов.Книга легко понять, графика полон графики, читаемость и практичность сильны. Она может использоваться в качестве учебника для майоров беспилотников в профессиональных школах, технических колледжах и книгах для учебных заведений беспилотников. Ссылка.
Оглавление
последовательность
Предисловие
Глава 1 самолеты и БПЛА / 001
1..1 самолет/001
1..2 БПЛА/001
Просмотреть вопросы мышления/011
Глава 2 Принципы полета и структуры БПЛА/012
2..1 Принцип рейса БПЛА/012
2..2 Структура БПЛА/015
Просмотреть вопросы мышления/026
Глава 3 Динамика беспилотника/028
3..1 Pistons Air Engine/028
3..2 Турбинный авиационный двигатель/031
3. Двигатель лития батареи/034
3..4 Гибридное масло и электричество (топливный двигатель+литийная батарея)/045
3..5 Мощность водородных топливных элементов/045
3..6 Солнечная энергия/046
Просмотрите вопросы мышления/046
Глава 4 Операционная система управления полетом Donal Machines/048
4..1 оборудование/048
4..2 программное обеспечение/055
Просмотреть вопросы мышления/057
论 Введение в технологию беспилотников
Глава 5 Приводится в движение/060
5..1 Беспроводной сигнал/060
5..2 Дистанционное управление/060
5..3 Данные, передача изображения/064
Просмотреть вопросы мышления/071
Глава 6 Материалы БПЛА/072
6..1 Дерево/072
6..2 металл/073
6..3 НЕ -МАТАЛ/075
Просмотреть вопросы мышления/076
Глава 7 Сценарии загрузки задачи и применения/078
7..1 Загрузка задачи/078
7..2 сцена приложения/084
Просмотреть вопросы мышления/108
Глава 8 БПЛА и Спортивный конкурс/109
8..1 Спортивный конкурс/109
8..2 перекрестная машина/109
Просмотреть вопросы мышления/118
Глава 9 Антивонный метод/119
9..1 угроза дронов/119
9 .. Основной метод антиворона/119
Просмотреть вопросы мышления/122
ПРИЛОЖЕНИЕ БПЛА -СПОЛНЕНИЕ ФАЙЛА/123
ПРИЛОЖЕНИЕ АВТОМОБИЛЬНОЕ ПРАВДА УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЯ (проект мнений)/123
Приложение B Правила управления драйвером беспилотников/137
Просмотреть вопросы мышления/144
Ссылки/147
……………………………………………………………………………………………………………………………………………………
«Четвертый ротор беспилотный дизайн самолетов»
В этой книге систематически обсуждаются основные принципы и основные методы управления четырехмоторным самолетом. Начните реализовать дизайн квадроклатерального самолета немного. Весь исходный код, который может быть напрямую разработан для разработки учебных программ или научных исследовательских проектов.Эта книга предоставляет весь исходный код дизайна, чертежи дизайна и демонстрационные видео, которые удобны для читателей для изучения и использования. Он предоставляет обмену обучения. Добро пожаловать читателям для участия и учиться с большинством энтузиастов STM32, чтобы решить проблемы, с которыми сталкиваются в дизайне. своевременно.
краткое введение
Четырех осевой самолет -это беспилотный самолет и умный робот.“ четыре оси” относится к мощности самолета, предоставленного 4 летными двигателями ротора.Народные исследования на четырех осевых самолетах связаны с военными в гражданские и коммерческие площадки.В последние десятилетия, с разработкой современной теории управления и технологии электронного управления, использование современной технологии управления, используя двигатели вместо нефтяных двигателей для четырех осевых исследований по управлению самолетами.В этой книге используется микропроцессорная платформа серии STM32, чтобы объяснить проектирование четырех осевых самолетов из проектирования схемы проектирования, выбора устройства и отладки кода. Дизайн.Эта книга может быть использована в качестве справочника для связанных специальностей, таких как электроника, общение и контроль, или техническая справочник для смежного технического персонала.
об авторе
Feng Xinyu: вступление в разработку и связанное с этим обучение встроенных системных проектов.Он принимал или участвовал в более чем 20 проектах и разработке проектов; за последние 10 лет он работал учителем руководства для участия в Национальном конкурсе электронного дизайна, конкурса электронного дизайна Feisica, конкурса электронного дизайна Heilongjiang и других задач. Различные крупные награды.Персональные представительные работы включают в себя «ADS2009 РЧ-конструкция и симуляция», «Основы встроенного ARM 9 и пример Advanced» и «Архитектура и программирование ARM Cortex-M3»).
Каталог
Оглавление
Глава 1 Введение
1.1 ИСТОРИЯ
1.2 Статус исследования самолета ротора
1.3 Основные применения четырехсторонних самолетов
Глава 2 Принцип управления
2.1 Конструкция самолета ротора
2.2 Метод управления движением четырехкратного самолета самолетов
2.3 Принципы работы каждой части
2.3.1 Отношения летающей позы и подъема
2.3.2 Измерение летной позы
2.3.3 Принцип работы датчика ускорения и измерение угла
2.3.4 Измерение принципа и угла датчика датчика гироскопа
2.3.5 Принцип работы магнитного датчика и метод измерения
2.4 Метод решения жестов
2.4.1 Алгоритм дополнительного фильтра
2.4.2 Алгоритм фильтра кармана
2.4.3DMP получение данных поленя
2.5PID Алгоритм управления
2.5.1PID Обзор
2.5.2 Четырех осевой конструкции контроллера PID -контроллера самолета
Глава 3 Дизайн аппаратного обеспечения
3.1 Соглашение о подготовке знаний
3.1.1spi автобус
3.1.2i2c автобус
3.1.3usart Автобус
3.2 Общий дизайн
3.2.1 Основная структура схемы дистанционного управления
3.2.2 Основная структура для основной цепи управления самолетом
3.3 Минимальная конструкция системы управления пленкой
3.3.1 Основные принципы
3.3.2 Конструкция аппаратной схемы
3.4 Модуль датчика состояния
3.4.1 Основные принципы
3.4.2 Конструкция аппаратной схемы
3.5 Модуль беспроводной связи
3.5.1 Основные принципы
3.5.2.
3.6 Определить высокий модуль
3.6.1 Ультразвуковой фиксированный высокий модуль
3.6.2 Высокий модуль измерителя давления воздуха
3.7 Модуль двигателя и драйвера
3.7.1 Основные принципы
3.7.2.
3.8 Конструкция модуля дистанционного управления
3.8.1 Основные принципы
3.8.2 Проектирование аппаратной схемы
3.9 Выбор модуля питания
3.10 Сборка самолета с четырьмя осью
3.10.1 Связь между двигателями, мякотью, батареей и моделями
3.10.2 Сборка стойки
Глава 4 Программный дизайн
4.1 Знание подготовки программного обеспечения
4.1.1.
4.1.2 Используйте угол Эйлера, чтобы описать угловое положение прочного тела в фиксированной точке
4.1.3 Четыре числа юаня
4.1.4 Алгоритм управления и фильтрации
4.2 Настройки инициализации и инструкции основной программы управления
4.2.1 Порт ввода/вывода порта ввода/вывода портализации
4.2.2iics Инициализация ввода/вывода
4.2.3 Реализация инициализации таймера
4.2.4 Реализация инициализации электронного регулятора скорости
4.3 Конструкция программного обеспечения для датчика государственного датчика
4.3.1 Основная идея дизайна программного обеспечения
4.3.2DMP
4.3.3 Реализация и анализ кода
4.4 Byrastinating Software Design
4.4.1 Основная идея дизайна программного обеспечения
4.4.2 Реализация и анализ кода
4.4.3 Реализация автономного высокого контроля
4.5 Дизайн программного обеспечения с дистанционным управлением
4.5.1 Основная идея дизайна программного обеспечения
4.5.2 Реализация и анализ кода беспроводного модуля
4.5.3 Реализация и анализ ракетного кода
4.6 Дизайн программного обеспечения для камеры
4.6.1 Основная идея дизайна программного обеспечения
4.6.2 Чтение данных камеры
4.6.3 Обработка данных камеры
4.7 Конструкция верхней машины
4.7.1 модуль обнаружения головки рамы
4.7.23D модуль модели модели
4.7.33d модуль модели модели настройки атрибута
4.7.4 Модуль отображения 3D гироскопа 3D
Глава 5 Децентрализация, анализ проблем и направления улучшения
Приложение ASTM32F4 Минимальная схема системной схемы
Приложение B Схема удаленного управления
Приложение C Схема подключения к летающей плате управления полетом
Рекомендации