Принтер, мотор, драйвер, модуль, радиатор, 3D печать, A4988






Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара









Описание продукта:
Представьте видео:http://v.youku.com/v_show/id_xnjexntmwmja4.html
Техническая поддержка и гарантия:
100%согласуется с официальным вики -продуктом!Исходный файл pcb http://reprap.org/wiki/stepstick.
Тест мощности будет выполнен перед доставкой, чтобы убедиться, что он может быть официально использовать перед доставкой.
Специальная записка:
Согласно сильной реакции пользователя, RS заменяется от 0,2 евро до 0,1 евро, так что максимальный ток водителя может поддерживать 2A.
Преимущества функции:
1. Процесс покрытия медного покрытия печатной платы модернизируется до 2 унций (толщина медной кожи составляет 70 мкл, общий составляет 35 мкм), что выше в меди. Конечно, характеристики рассеяния тепла лучше.
2. Элементарная игла была сварена, золото, иглы, отличное качество.
3. Различные партии цветных оттенков печатной платы немного отличаются, а качество одинаково хорошее
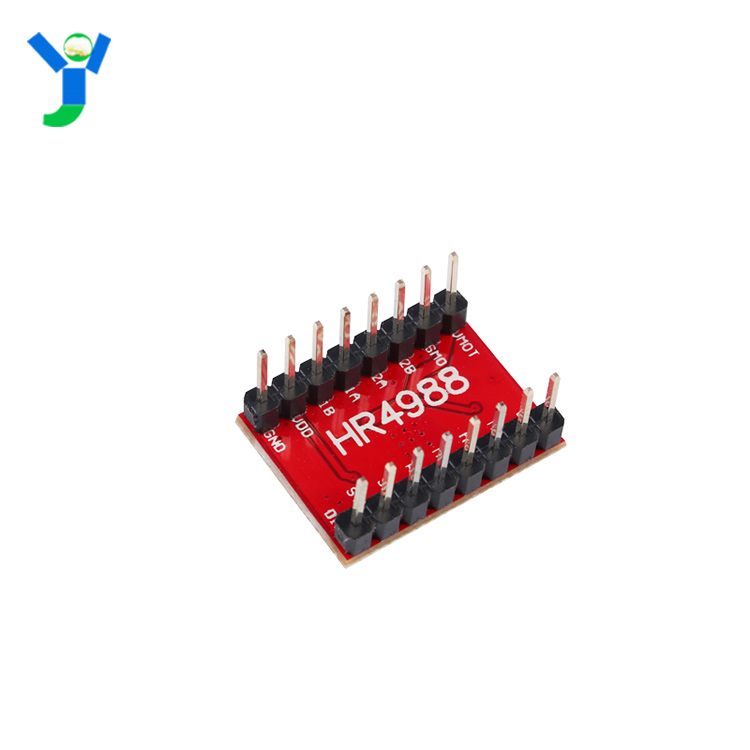
Параметры продукта:
- Размер: 1,5 мм2 мм (для рампов, ультикулярного или других совместимых плат);
- Вес: 3,7 г
- Can Drive Ток: 2a (рекомендуется установить радиатор)
- Сегментация: 1, 1/2, 1/4, 1/8, 1/16
- Процесс изготовления: производство пластыря SMT, несуществующая сварка, более высокий уровень урожайности, более стабильная производительность
Сценарий приложения:
- Вам нужно водить шаг двигатель.
- Это обязательный модуль BEI для строительства 3D -принтеров, ЧПУ, скульпторов и т. Д.
- Поддерживаемые 3D -принтеры включают Prusa Mendel, Ultimaker, Printbot, Makerbot и т. Д.
- Вы можете ссылаться на более поздний код UNO и напрямую управлять двигателем
Core Chip A4988 Введение:
A4988 -это микро -шаг DMOS с защитой преобразователя и перегрузки. Этот продукт может управлять двумя шагом двигателя в полном объеме, половина, 1/4, 1/8 и 1/16, производительность выходного привода может достигать 35 В. и±2. A4988 включает в себя регулятор напряжения тока с фиксированным временем, который может работать в медленном или смешанном режиме ослабления.Конвертер является ключом к простой реализации A4988.Просто введите импульс на входе «ступенчатой», вы можете привести двигатель для генерации микроскопических этапов.Нет необходимости выполнять таблицы фазовых последовательностей, строки управления с высокой частотой или сложное интерфейсное программирование.Интерфейс A4988 очень подходит для сложных микропроцессоров, которые недоступны или перегружены.
Особенности A4988:
1. шаг мотор для вождения 8 В ~ 35 В 2А;
2. Есть только простые шаги и интерфейсы управления направлением;
3. Пять различных режимов шага: полная, половина, 1/4, 1/8 и 1/16;
4. Регулируемый потенциометр может отрегулировать максимальный выход тока, чтобы получить более высокую скорость шага;
5, обнаружение/выбор режима автоматического затухания тока;
6. Перегрев схему отключения, под замком давления, перекрестная защита;
7. Короткая защита и загрузка короткой защиты
Используется в качестве 3D -принтера, модуль поддерживающей цепи:
- UNO 2560
- Основная доска процессора
- Ramps1.4 Основная плата управления
- A4988 модуль привода двигателя Driven Poard (4 одиночных головок, 5 таблеток)
- ЖК -жидкокристаллический контроллер может контролироваться с ЖК -дисплеем LCD, SD -карта автономной печати (необязательно)
Используйте UNO, чтобы напрямую контролировать использование двигателя:
Следующим образом, ООН управляет шагом и направлением в тормоз A4988.
1a, 1b одна группа, 2a, 2b, подключенная к другой группе, как правило, 1a 2a подключен к положительному полюсу, 1b 2b -это соединение с отрицательным электродом, поскольку двигатель отличается, лучше попробовать после выбора Чтобы увидеть, правильно ли это. Если это неправильно, измените его положительно.
Тестовый код:
int dirPin = 8;
int stepperPin = 7;
void setup()
{
pinMode(dirPin, OUTPUT);
pinMode(stepperPin, OUTPUT);
}
void step(boolean dir,int steps)
{
digitalWrite(dirPin,dir);
delay(50);
for(int i=0;i<steps;i++){
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800); }
}
void loop()
{
step(true,1600);
delay(500);
step(false,1600*5);
delay(500);
}



