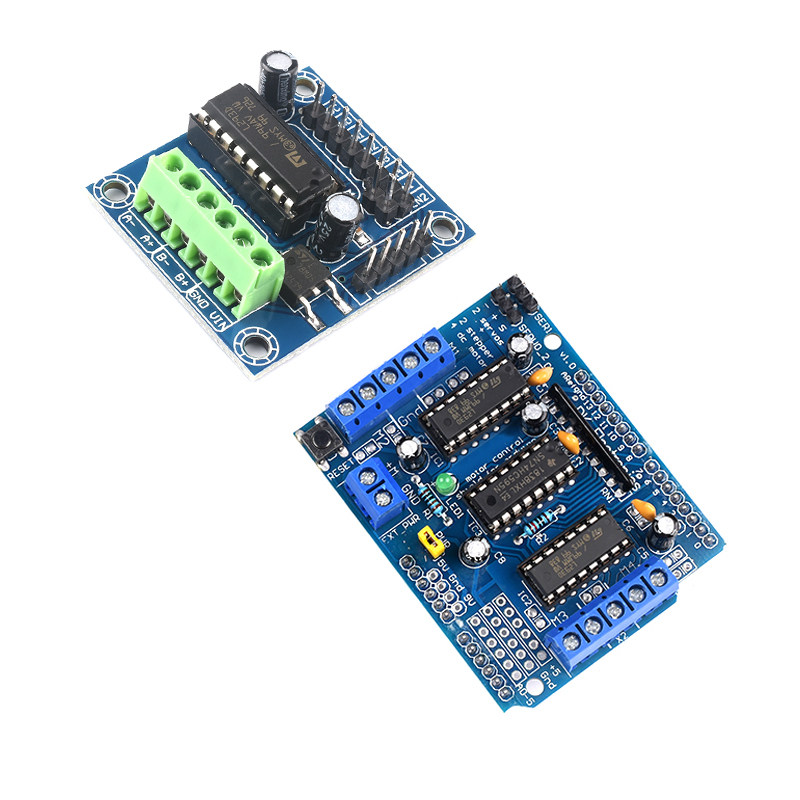
Электрический модуль модуля расширения





Цена: 95-130руб. (¥4.48)
Артикул: 596194232543
Доставка по Китаю (НЕ включена в цену):
53 руб. (¥2.5)
Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товараПродавец:欣薇电子企业店
Рейтинг:
Всего отзывов:0
Положительных:0
Выберите вариацию / цвет


Добавить в корзину
Другие товары этого продавца





¥0.154руб.
¥0.256руб.
¥2.860руб.
¥1.839руб.
| Цвет: | L293D Плата расширения двигателя, Mini L293D Плата расширения двигателя |
Канал передачи данных:
https://pan.baidu.com/s/1m4tdicqqf7ry-b-r5i5ltg?pwd=8889
Извлечение кода: 8889
Minil293D Правление по расширению водителя ~

Канал передачи данных:
https://pan.baidu.com/s/1c- iw8cpogxtgsu23q8y6ka
Извлечение кода: HXMQ

Ссылка загрузки данных:
https://pan.baidu.com/s/1van_4nnecebg9pv2xz0wma
Извлечение кода: 8888

Библиотечный адрес загрузки:
https://github.com/adafruit/adafruit-motor-shield-library/archive/master.zip

1. Шаг кода двигателя.
#include
Двигатель AF_STEPPER (48, 2); // 48 означает количество недель (360 градусов/угол шага, угол 48 стадий составляет 7,5 градусов), 2 указывает на второй шаг в двигатель (всего две опоры)
void setup() {
Serial.begin(9600); // скорость поттера: 9600 б.п.
Serial.println("Stepper test!");
motor.setSpeed(10); // 10 rpm
motor.step(100, FORWARD, SINGLE);
motor.release();
delay(1000);
}
void loop() {
motor.step(100, FORWARD, SINGLE);
motor.step(100, BACKWARD, SINGLE);
motor.step(100, FORWARD, DOUBLE);
motor.step(100, BACKWARD, DOUBLE);
motor.step(100, FORWARD, INTERLEAVE);
motor.step(100, BACKWARD, INTERLEAVE);
motor.step(100, FORWARD, MICROSTEP);
motor.step(100, BACKWARD, MICROSTEP);
}
2. Код экземпляра двигателя DC DC
#include
AF_DCMOTOR MOTAR (2, Motor12_64KHZ); // DC Motor #2, 64 кГц ШИМ
void setup() {
Serial.begin(9600); // Скорость поттера: 9600 бит/ с
Serial.println("Motor test!");
motor.setSpeed(200); // скорость: 200/255
void loop() {
Serial.print("tick");
motor.run(FORWARD); //Вперед
delay(1000);
Serial.print("tock");
motor.run(BACKWARD); // обеспечить регресс
delay(1000);
Serial.print("tack");
motor.run(RELEASE); // останавливаться
delay(1000);
}
