Технология управления автомобилями (база 2) Исторические изменения технологии автомобильного управления и будущих тематических сборов управления шасси управляют некоторыми моделями.




Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара






последовательность
Предисловие
Редактировать
D1 D1.
111 Подразделение 1
AD1 Поколение 1
BD2 поколение 1
CD3 поколение 1
12 меры для решения проблем экологической энергии 2
A System Control 2
B автоматический круиз 2
C Комплексный контроль над двигателем и системой вождения 3
13 управление вождением и улучшение безопасности 3
A Anti -Hugging Corrame System (ABS) 3
B Система управления тягой (TCS) 4
C предотвратить систему бокового скольжения (VSC) 4
14 стремление к комфорту вождения 5
A ссылки контролируемая подвеска 5
B заднее рулевое управление (4WS) 5
C Помогите рулевое управление (PS) 6
D Четырехлетный управление приводом (4WD) 6
e Активная подвеска 6
F Комплексная система управления и проектное решение 7
15 Вспомогательная вспомогательная система и интеллект 9
A предотвратить контроль аварий 9
B реализация интеллектуальных автомобилей 9
C Future 10
Ссылки 10
ГЛАВА D2 СЕРИЯ ЭРЕВИТЕЛЬНОЙ ИСКУССТВО И ДВИЖЕНИЯ И ДО
Единый контроль 11
21 управление двигателем 11
A Низкие выбросы 12
B низкий расход топлива 12
C Comfort 12
D Надежность и безопасность 12
22 Система управления двигателем 12
A inlet air 12
B Fuel 13
C Время зажигания 13
D EGR13
23 Модель двигателя 14
A Модель расчета 14
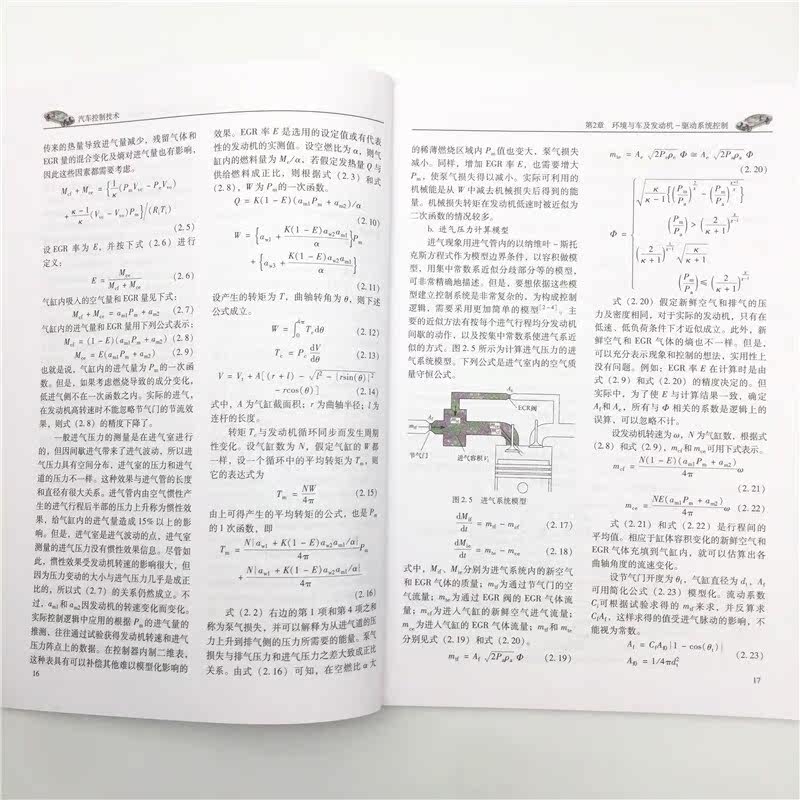
B Модель расчета давления в потреблении 17
C Dynamic Model 18
D Модель расчета скорости двигателя 22
24 Логика управления двигателем 23
A Низкий контроль эмиссии 24
B Увеличение низкого расхода топлива и производительности мощности 30 30
25 Будущее управление двигателем 32
26 управление системой привода 32
A низкий расход топлива 33
B Comfort 34
27 Модель системы управления двигателем 34
28 Система управления автоматической коробкой передач 37
29 Логика управления приводом 37
A Spliting Control 38
B Shift Control 38
210 Future Driving System Control 43
211 Двигатель Future 43 управление вождением 43
Ссылки 44
Глава D3 Безопасность и контроль шасси 46
31 Инцидент Избегайте технологии 46
32abs История развития и статус -кво 47
321Abs разработка 47
322 контроль гонки ABS (Соединенные Штаты) 49
Применение авиационной технологии 49
B Basic Technology Development 49
323 Четырех управление колесом ABS52
Алгоритм управления A 52
B High -Speed Selection и низкоскоростной выбор 54
C Гидравлическое агентство исполнения 55
3 2 4 японского ABS56
Текущая ситуация 325abs 57
A Swerral Точность улучшения скорости корпуса транспортного средства 57
Bger Depulations на статус дорожного покрытия 58
C Four -Wheel Drive использует ABS58
D автомобиль вибрации тела и реакция педали 58
E Запуск управления ABS58
33TCS Статус -кво и будущее 59
331TCS разработка.
332TCS экземпляр 61
A System A (Nissan E-TS) 62
B System B (Bosch) 63
C System C (Mitsubishi TCL) 64
D System D (Honda TCS) 64
33 驱 3 Основная форма управления приводом 65
33 驱 4 Классификация системы управления приводом 66
335 Текущее состояние системы управления дисками и будущее 66
34 Будущие технологии и управление управлением автомобилем 67
341 Понимание основной формы контроля 67
A контроль датчика и реальность вождения
Управление покупками 68
B Визуальное управление и сенсорное управление 68
C Личный контроль и социальный контроль 69
342 Уровень и ассоциация теории контроля 69
343 Инженерный проект и будущие технологии 70
35 Конец слова 70
Ссылки 70
Глава D4 Комфортное вождение и технология управления шасси 72
41 Комфорт вождения 72
411 Решение противоречий и комфорта 72
412 Улучшение производительности и комфорта 72
42 Разработка системы управления 73
421 Электронная контрольная подвеска 73
A Система регулировки высоты тела 74
B Dempling Control 74
C Активная подвеска 77
422 Система рулевого управления задним колесом 81
A A Метод пропорции угла рулевого управления.
B Метод обратной связи с усилием рулевого управления 82
C Горизонтальный угол Угол Скоровой Метод обратной связи 84
D Метод отслеживания модели 84
E нелинейный контроль 85
F Переполняющая защита 86
4234WD Control 86
Интеграция системы 424 87
425 Информация управления 90
Суждение о внешней среде транспортного средства 91
B Суждение о намерении водителя 91
43 Проект системы управления шасси.
431 Система управления интегрированной 92
A Функциональный интегрированный 92
B Информация интегрирована 93
C 93
432 Исследование по цели контроля 93
433 Другие темы 93
44 Комфорт вождения в будущем 94
44 综 1 Комплексная концепция контроля 94
442 High -Procemance 94
443 контроль устойчивости транспортного средства 95
45 Конец слова 95
Ссылка 96
Глава D5 Интеллектуальная вспомогательная система вождения автомобиля 97
51 Драйвер и вспомогательная система вождения 97
511 Отношения между автомобилями и водителями 97
51 辅 2 Классификация вспомогательного вождения 97
52 Социальные проекты и интеллект Auto Auto
Улучшить 99
521 повышение безопасности 99
A предотвратить обнаружение лаг 99
B Профилактическая реакция задержка 99
522 Облегчение блокировки трафика 99
Закуски, вызванная поведением драйвера 99
B увеличила емкость трафика 100
523 Улучшение расхода и выбросов топлива 100
A сокращение времени парковки на 100 времен парковки
B Стабильность движения скорости 100
C Оптимизация скорости движения 100
D Track Car Group Group, снизите сопротивление воздуха на 100
524 Улучшение удобства и комфорта 100
53 Пример R & D. 100
531 Информация управления Вспомогательной системой 101
Аварийная система тревоги 101
B Side Abrisecle System 102
C Close -Up Opplack System 103 103
D Lane Lane Departure System 103
E Road Danger Alarm System 104
F усталость Система сигнализации 104
532 Система помощи операции управления 106
A Auxiliary System 106 A -
B Операция рулевого управления Вспомогательная система 108
533 операция автоматически в чрезвычайных ситуациях
Система 109
A АВТОМОБИЛЬНАЯ ТОРГОВАНИЯ СИСТЕМА 109
BPrive от отклонения системы переулка 110
C АВТОМОБИЛЬНЫЙ Рулевая система.
534 Частичная автоматизация при правильном вождении
Система управления 110
Адаптивная система круиз -контроля 110
B LANE HEART SYSTEM 112
54 Интеллектуальная общая технология 113
54 障 1 Технология идентификации препятствий 113
A оптический радар 113
B радар 114
C расстройство распознавания обработки обработки 115
D Technology Technology Technology Project 116
542 Технология распознавания полосы движения. 117
A Белая линия распознавание изображений 117
B New Lane Logo распознавание 117
C Тема идентификации пути 119
543 признание дорожных препятствий впереди 119
A распознавание транспортного средства 119
B Идентификация инфраструктуры 119
544 Расположение автомобиля и распознавание железнодорожного пути 120
A Закон о позиционировании 120
B GPS Satellite Измерение 120
Эта книга будет сосредоточена на управлении, то есть в программной логической части, объясняет исторические изменения и будущие темы технологии управления автомобилем.Начиная с первоначального намерения этой серии книг, он не занимается освещением всех профессиональных областей.
