CNC Shield v3 Evanors Extension 3D Printer A4988





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара



- Информация о товаре
- Фотографии
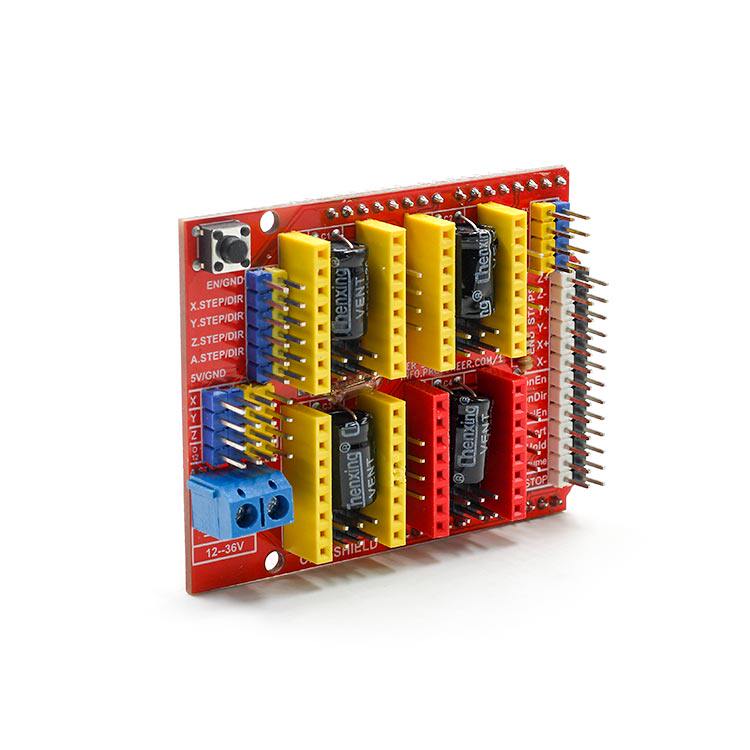

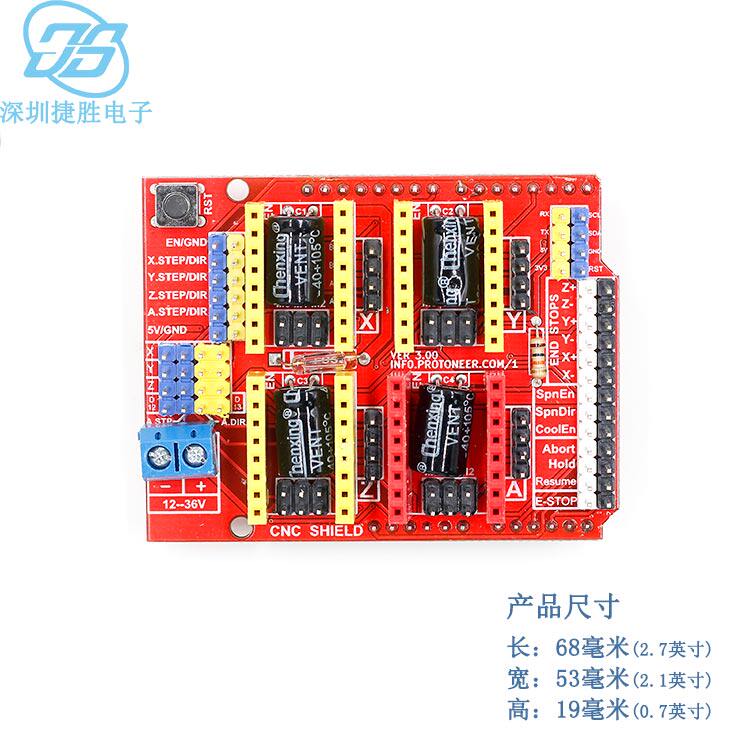
один, Описание продукта
Эту плату расширения можно использовать как гравировальный станок,3DЕсть общие платы расширения драйверов для принтеров и т.д.4Слот модуля драйвера шагового двигателя, (Обратите внимание, что эта плата не включает в себяA4988Модуль привода шагового двигателя при необходимости можно приобрести отдельно в нашем магазине.), можно ездить4Шагового двигателя нет, и каждому шаговому двигателю требуется только2индивидуальныйIOРот, то есть6индивидуальныйIOЭтим можно очень хорошо управлять, просто говоря.3Шаговый двигатель очень удобен в использовании, попрощавшись с громоздкой работой традиционных шаговых двигателей.
два,UNO с модулямиIOВведение в устную переписку
Для базового управления шаговым двигателем требуются штифты, остальные штифты находятся на гравировальном станке или3DИспользуется только при печати.Мы не будем объяснять это подробно здесь.IOСоответствует рисунку выше.
8 ------------------------ EN 
7 ----------------------- z.dir (управление направлением вала)
6 ----------------------- y.dir (управление направлением оси)
5 ----------------------- x.dir (управление направлением оси x)
4 ---------------------- z.step (шаг управление осью z)
3 ---------------------- y.step (шаг управление оси y)
2 ---------------------- x.step (шаг управление оси x)
//Ниже приведена простая программа управления шаговым двигателем,
#define EN 8  
#define X_DIR 5 // x ось  управление направлением двигателя шага
#define Y_DIR 6 // y ось  управление направлением двигателя шага
#define Z_DIR 7 // z ось  управление направлением двигателя шага
#define X_STP 2 // x ось  управление шагом
#define Y_STP 3 // y ось  управление шагом
#define Z_STP 4 // z ось  управление шагом
/*
//Функция: шаг   Функция: управляйте направлением двигателя, количество шагов.
//Параметр: каталог  управление направлением,  DIRPIN соответствует  Step Pins of -Step Motor, steps&Nbsp; ступени шагов
//Нет возвращаемого значения
*/
void step(boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite(dirPin, dir);
delay(50);
for (int i = 0; i < steps; i++) {
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
void setup () {// Установите стопю для io, используемая двигателем Step to
pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
pinMode(Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(EN, LOW);
}
void loop(){
step(false, X_DIR, X_STP, 200); // x -оси двигатель&Nbsp; обратный 1 круг, 200 шагов - это круг
step(false, Y_DIR, Y_STP, 200); // y -оси двигатель&Nbsp; обратный 1 круг, 200 шагов - это круг
step(false, Z_DIR, Z_STP, 200);&NBSP; // z мотор оси&Nbsp; обратный 1 круг, 200 шагов - это круг
delay(1000);
step(true, X_DIR, X_STP, 200); // x -оси двигатель&NBSP; 1 круг, 200 шагов по кругу
step(true, Y_DIR, Y_STP, 200); // y -оси двигатель&NBSP; 1 круг, 200 шагов по кругу
step(true, Z_DIR, Z_STP, 200);&NBSP; // z мотор оси&NBSP; 1 круг, 200 шагов по кругу
delay(1000);
}
Экспериментальное явление: шаговый двигатель вращается в обратном направлении, останавливается на 1 секунду, затем движется вперед в одном направлении и так далее.
Стоит отметить: при подключении модуля A4988 будьте осторожны, чтобы не подключить его наоборот. Способ подключения шагового двигателя:
2A ,2B&NBSP;&NBSP;
Там нет гарантии, нет проблем без возвращения!Пересечение