Mini KK 2.1.5 Flying Control VTOL V Tail Новая прошивка Self -Balancing Rotunts Прямой подаче





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара
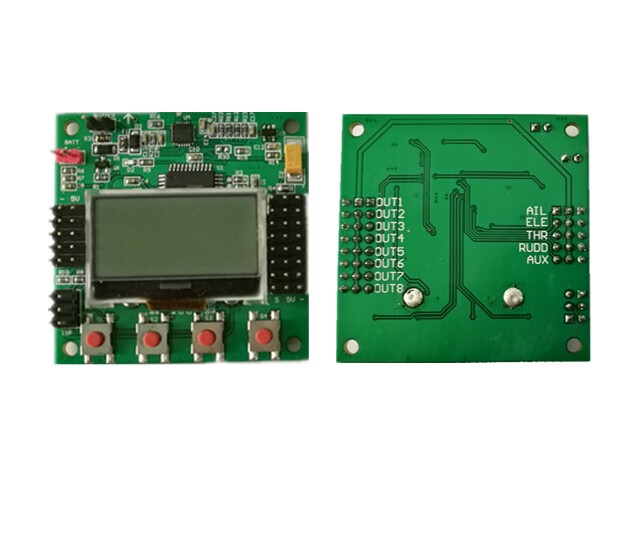
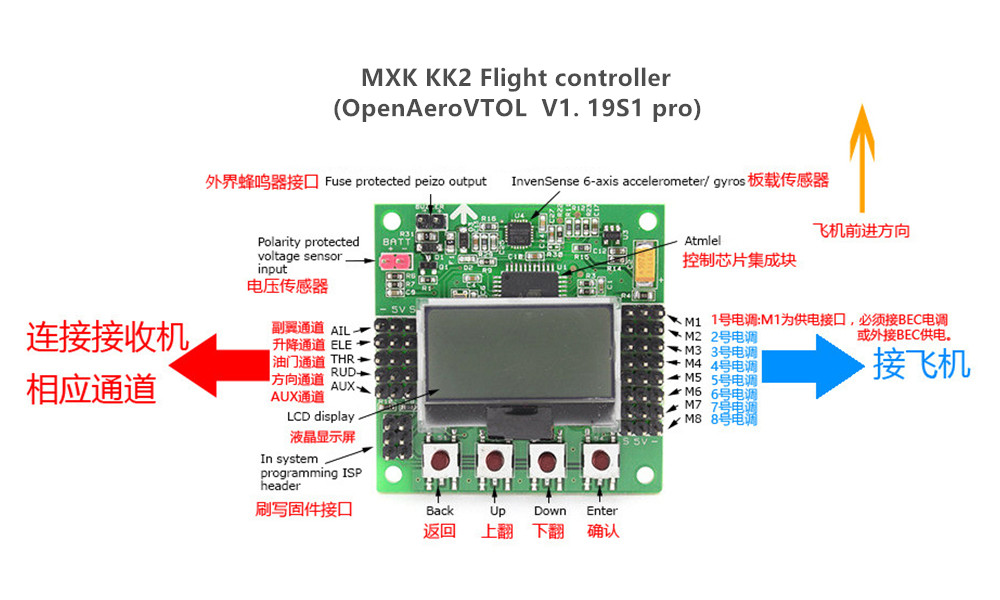
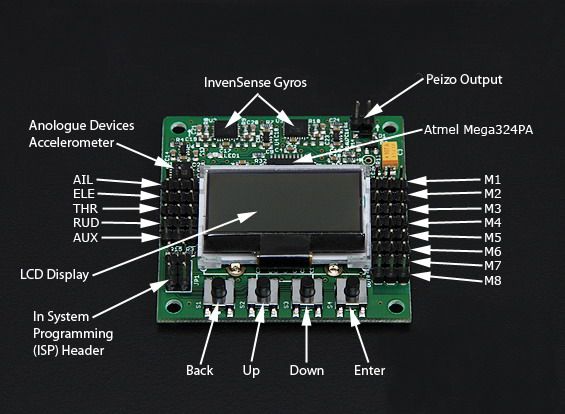
- Управление полетом





| Классификация цветов: | Фотография, KK Burninger (для прошивки щетки) |
| Типы самолетов: | Управление полетом |

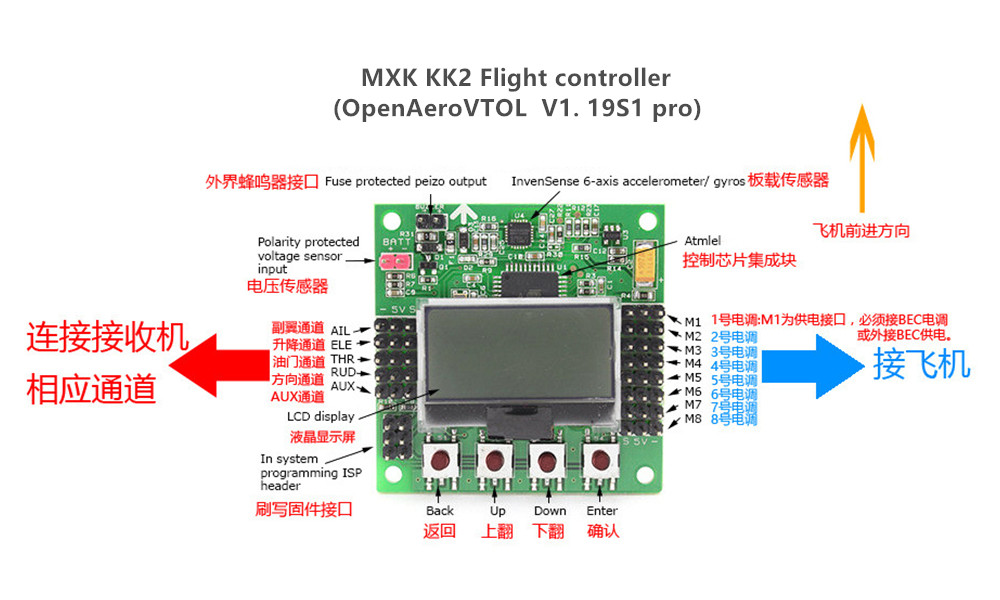
При покупке на Таобао в качестве индивидуального покупателя обратите внимание, установлена ли прошивка. V1.19S1 pro, or OpenAeroVTOL .
Инструкции по покупке: Этот элемент управления полетом представляет собой английскую версию системы управления полетом начального уровня с открытым исходным кодом. Все настройки отладки можно выполнить на встроенном экране. Однако рекомендуется приобретать его только в том случае, если у вас есть базовые знания о моделях самолетов, понимание принципов дистанционного управления моделями самолетов, двигателей и регуляторов скорости, а также сильные навыки самообучения. , please read the detailed introduction in the link carefully for the interface definition and setting method steps of the flight control, and set it up with your own remote control and other equipment. Служба поддержки клиентов не предоставляет базовых знаний и технических рекомендаций по моделям самолетов. Эта служба контроля полетов не принимает возвраты или возмещение средств в случае проблем, не связанных с качеством.Please know!
Прямые продажи с фабрики, последняя версия KK2.15
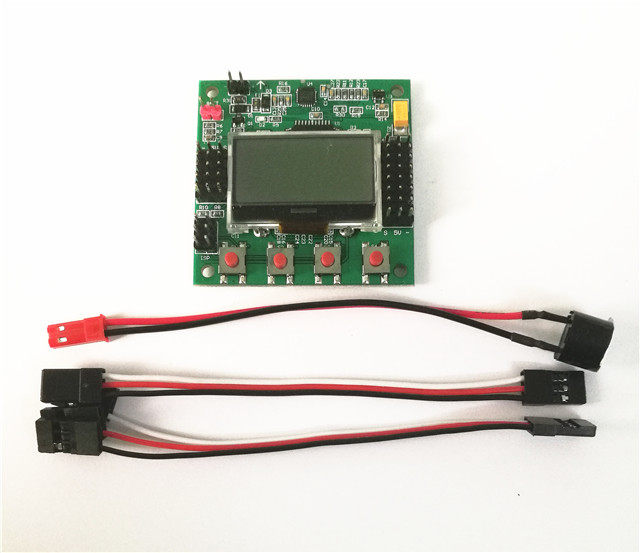



- Удалить все винты,Но три кабеля между двигателем и электричеством должны быть подключены, иначе вы не услышите движение!
- Лучше всего вытащить рулевое снаряжение от управления полетом.Потому что какая -то рулевая передача не может выдержать слишком много изменения сигнала.
- УдержатьВ дополнение к любым кнопкам слева, затем подключите электричество.
- Продолжайте держать кнопку, пока он не услышат тревогу мотора на самом высоком уровне дроссельной заслонки, и немедленно выпущен.
- Подождав несколько секунд, пока мотор и ESC перестанут издавать звуковой сигнал, нажмите «EXIT»; для возврата к главному экрану SAFE.

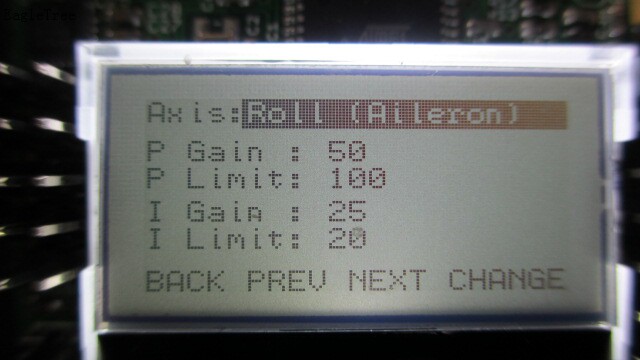
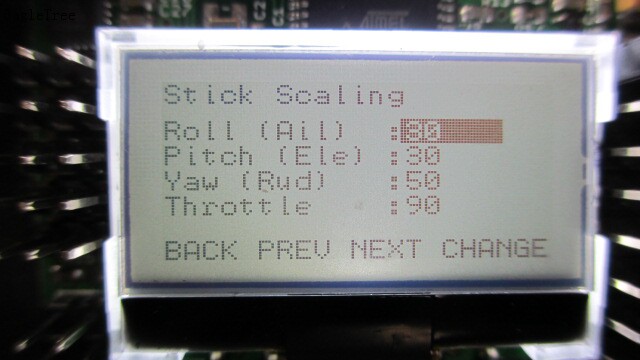
Roll/Pitch Axis:
Pgain = 150 Plimit = 100
Igain = 50 Ilimit = 20
Yaw Axis:
Pgain = 150 Plimit = 20
Igain = 50 Ilimit = 10
 ,
,