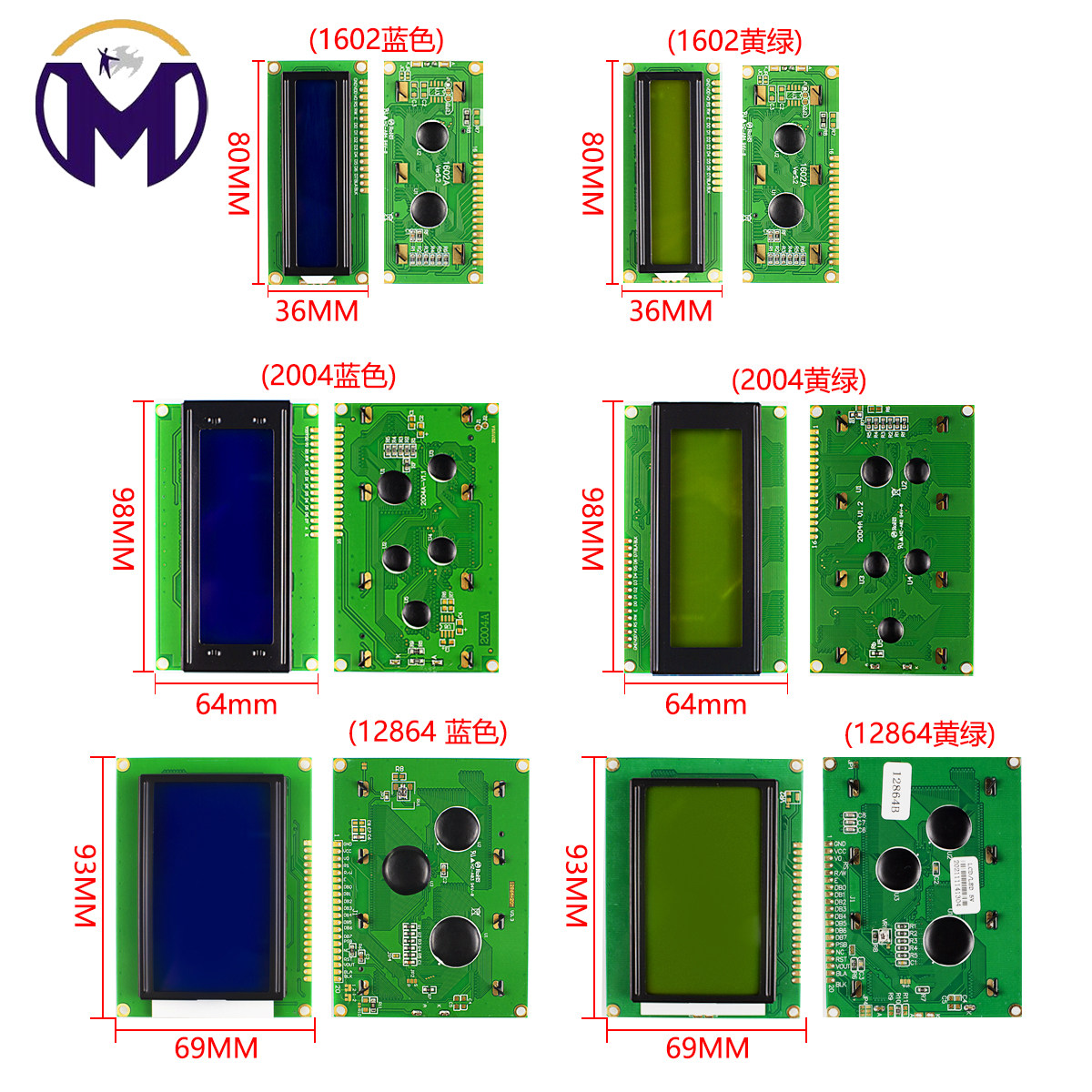
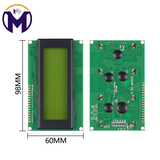
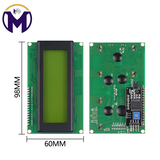
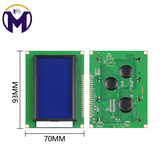
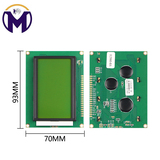
1602a 2004a 12864b ЖК -экран китайский английский английский с подсветкой IIC/I2C Синий экран Желтый зеленый экран


Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара




- 12864 английская версия синий экран

- 0802 сингл -экрановый синий 14p




| Цвет: | 1602 синий экран., 1602 Желтый одноэкран, 1602 синяя сварка i2c модуль, 1602 Желтый модуль I2C, Синий экран 2004 года., 2004 Желтый одноэкран, Blue Welding I2C модуль 2004 года, 2004 желтый модуль I2C 2004 года, 12864 английская версия синий экран, 12864 Китайская и английская версия синий экран, 12864 Китайская и английская версия желтая, 1604 синий экран., 1604 Желтый одноэкран, 1602 Сварная иголка, 1602 Сварная иголка, 0802 сингл -экрановый синий 14p |


Размер стекла
Синий белый характер
Стандартный модуль символов ЖК -дисплея 16x2 (подсветка/синий экран)
1602 использует стандартный интерфейс 16 -пин, из которого:
Нога: VSS - это наземный источник питания
Пестонал 2: VDD подключен к положительному источнику питания 5 В
№ 3: V0 - это контактный конец регулировки жидкокристаллического дисплея. При подключении положительного источника питания контраст слабый. Когда источник питания земли слишком высок, контраст создаст «призрачный тень».
Foot 4: RS выбирается регистром.
Foot 5: R/W -это линия сигнала чтения.Когда RS и RW обычно могут записывать инструкции или адреса отображения для низкой электричества, когда RS является RW низким уровнем RW, высокая мощность может читать сигнал заняты. Когда RS -RW высокого уровня, его можно записать в данные.
Пестонал 6: Конец -это Enable End. Когда END E -конце изменяется от высокого уровня на низкую электрическую сторону, LCD -модуль выполняет команду.
Получает от 7 до 14: D0 ~ D7 -8 -битный двухсторонний кабель данных.
5 футов: положительный полюс мощности подсветки
6 футов: отрицательный электрод питания подсветки отрицательный электрод
Символы внутри ЖК -модуля 1602 (CGROM) уже сохранили 160 различных точечных символов символов, как показано в таблице 1, эти символы: арабские цифры, случаи английских букв, широко используемые символы и японские псевдонимы и т. Д. , Каждый символ имеет фиксированный код, такой как код английской буквы «a» в верхнем регионе 01000001b (41H). Когда отображается дисплей, модуль показывает рисунок символа точечной -матрицы в адресе 41H. Мы можем Смотрите букву «А» А ».
Ниже приведена программа буквы «A» в положении второй строки модуля ЖК -дисплея: org 0000h
Rs aqu P3.7; определить метод подключения конкретного оборудования
RW equ P3.6; определить метод подключения конкретного оборудования
E -eque P3.5; определить метод подключения конкретного оборудования
MOV P1,#00000001B; Чистый экран и сброс курсора
Acall inable; вызовите подпрограмму команды письма
MOV P1,#00111000B; Режим настройки отображения: 8 -bit 2 строки 5x7 точечная матрица
Acall inable; вызовите подпрограмму команды письма
MOV P1,#000011111B; дисплей, курсор, курсор, допустимое мигание
Acall inable; вызовите подпрограмму команды письма
MOV P1,#00000110B;
Acall inable; вызовите подпрограмму команды письма
MOV P1,#0C0H; напишите адрес начала (вторая строка второй строки)
Acall inable; вызовите подпрограмму команды письма
MOV P1, # 01000001B; код букв a
SetB RS; RS = 1
Clr rw; rw = 0; готово написать данные
Clr e; e = 0; выполнить команду отображения
ACALL DELOCK; судить, занят ли ЖК -модуль?
Setb e; e = 1; отображение завершено, программная парковка
AJMP %lt;/font>
ENABLE:
CLR RS; подпрограмма, записанная в команду управления
CLR RW
CLR E
ACALL DELAY
SETB E
RET
DELAY:
MOV P1,#0FFH; определить, занят ли жидкокристаллический дисплей
CLR RS
SETB RW
CLR E
NOP
SETB E
P1.7, задержка;
RET
END
Программа инициализирует функцию ЖК -модуля в начале, и формат дисплея согласован.Обратите внимание, что маркировка времени отображения автоматически смещается вправо без ручного вмешательства. Каждая входная инструкция вызывается, чтобы определить, занят ли ЖК -модуль, а затем введите адрес позиции дисплея 0C0H. Сущность
SMC1602A (16*2) метод проводки моделирования
Диаграмма линии соединения:
---------------------------------------------------
LCM-----51 LCM-----51 LCM------51
------------------------------------------------
DB0 ----- P1.0 DB4 ----- P1.4 RW ------- P2.0
DB1 ----- P1.1 DB5 ----- P1.5 RS ------- P2.1
DB2 ----- P1.2 DB6 ----- P1.6 E -------- P2.2
DB3 ----- P1.3 DB7 ----- P1.7 VLCD-соединение 1K Сопротивление к GND
---------------------------------------------------
[Примечание: AT89S52 использует 12 -метровые кристаллы]
=============================================================*/
#define LCM_RW P2_0 // Определение булавки
#define LCM_RS P2_1
#define LCM_E P2_2
#define LCM_Data P1
#define Busy 0x80 // используется для обнаружения логотипа занятого в состоянии LCM
#Включать
void WriteDataLCM(unsigned char WDLCM);
void writeCommandlcm (unsigned char wclcm, buysc);
unsigned char ReadDataLCM(void);
unsigned char ReadStatusLCM(void);
void LCMInit(void);
Void displayonechar (unsigned char x, unsigned char y, unsigned char ddata);
Void DisplayListCHAR (Unsigned char X, Unsigned char Y, Unsigned char Code *ddata);
void Delay5Ms(void);
void Delay400Ms(void);
unsigned char code uctech[] = {"uctech"};
unsigned char code net[] = {"uctech.icpcn.com"};
void main(void)
{
Задержка400ms (); // Начните ждать, подождите, пока LCM поговорит о статусе работы
Lcminit (); // инициализация LCM
DoPload5ms (); // задержка на некоторое время (не)
DisplayListChar(0, 5, uctech);
DisplayListChar(0, 0, net);
Readdatalcm (); // тестовые предложения не имеют смысла
while(1);
}
// Написать данные
void WriteDataLCM(unsigned char WDLCM)
{
Readstatuslcm (); // проверить
LCM_Data = WDLCM;
LCM_RS = 1;
LCM_RW = 0;
Lcm_e = 0; // Если скорость вибрации слишком высока, вы можете добавить небольшую задержку после этого
Lcm_e = 0; // задержка
LCM_E = 1;
}
// Написать инструкции
Void writeCommandlcm (unsigned char wclcm, buysc) // внезапно проверить обнаружение внезапно проверить обнаружение
{
if (buysc) readstatuslcm (); // Проверка занята по мере необходимости
LCM_Data = WCLCM;
LCM_RS = 0;
LCM_RW = 0;
LCM_E = 0;
LCM_E = 0;
LCM_E = 1;
}
// Читать данные
unsigned char ReadDataLCM(void)
{
LCM_RS = 1;
LCM_RW = 1;
LCM_E = 0;
LCM_E = 0;
LCM_E = 1;
return(LCM_Data);
}
// читать статус
unsigned char ReadStatusLCM(void)
{
LCM_Data = 0xFF;
LCM_RS = 0;
LCM_RW = 1;
LCM_E = 0;
LCM_E = 0;
LCM_E = 1;
while (LCM_Data&Занят); // обнаружить сигнал заняты
return(LCM_Data);
}
void lcminit (void) // Инициализация LCM
{
LCM_Data = 0;
WriteCommandLcm (0x38,0); // три настройки режима отображения, сигнал без занятости
Delay5Ms();
WriteCommandLCM(0x38,0);
Delay5Ms();
WriteCommandLCM(0x38,0);
Delay5Ms();
WriteCommandLcm (0x38,1); // Настройки режима отображения, начинайте каждый раз требовать каждого тестирования.
WriteCommandLcm (0x08,1); // Выключить дисплей
WriteCommandLcm (0x01,1); // отображать прозрачный экран
WriteCommandlcm (0x06,1); // отображать настройки движения курсора
WriteCommandLcm (0x0c, 1); // отображать настройки Open и Cursor
}
// отображать символ в соответствии с указанным местоположением
Void displayonechar (unsigned char x, unsigned char y, unsigned char ddata)
{
Y&= 0x1;
X&= 0xf; // предел x не может быть больше 15, y не может быть больше 1
if (y) x = 0x40; // Когда отображается вторая строка второй строки, код адреса+0x40;
X = 0x80; // Рассчитайте код инструкции
WriteCommandLcm (x, 0); // Здесь нет сигнала заняты, отправьте адрес адреса
WriteDataLCM(DData);
}
// отображать строку символов в соответствии с указанным местоположением
Void DisplayListChar (Unsigned char X, Unsigned char Y, Unsigned char Code *ddata)
{
unsigned char ListLength;
ListLength = 0;
Y&= 0x1;
X&= 0xf; // предел x не может быть больше 15, y не может быть больше 1
while (DData[ListLength]>0x20) // Если вы достигнете конца строки
{
if (X<= 0xf) // x координаты должны быть меньше 0xf
{
DisplayOneChar (x, y, ddata [listlength]); // отображать один символ
ListLength++;
X++;
}
}
}
// 5 мс задержка
void Delay5Ms(void)
{
unsigned int TempCyc = 5552;
while(TempCyc--);
}
// задержка 400 мс
void Delay400Ms(void)
{
unsigned char TempCycA = 5;
unsigned int TempCycB;
while(TempCycA--)
{
TempCycB=7269;
while(TempCycB--);
};
Приведенные выше процедуры предназначены только для справки!Пересечение
