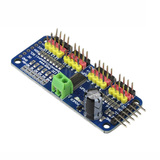
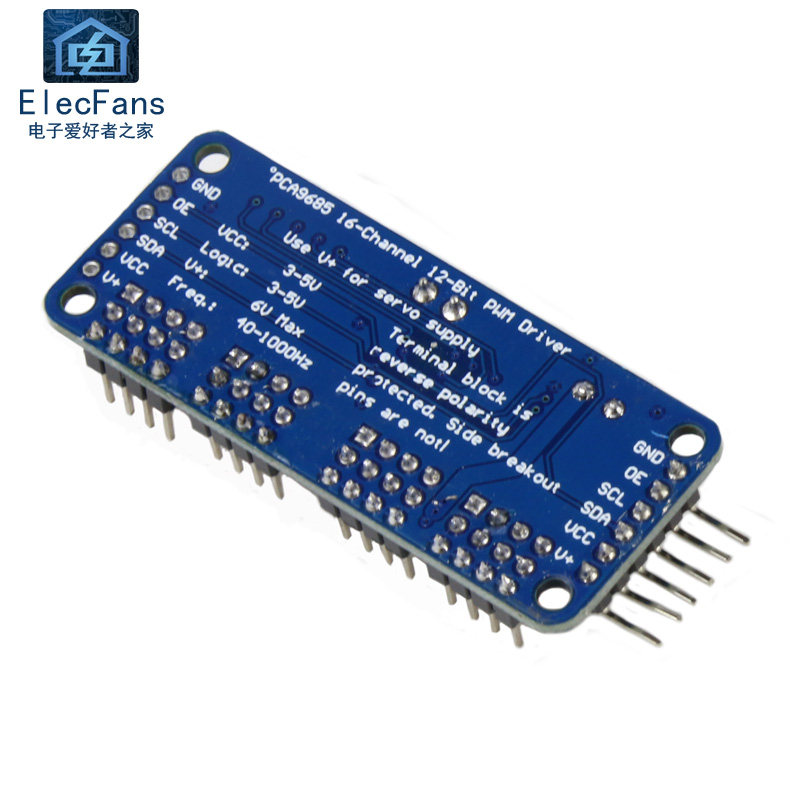
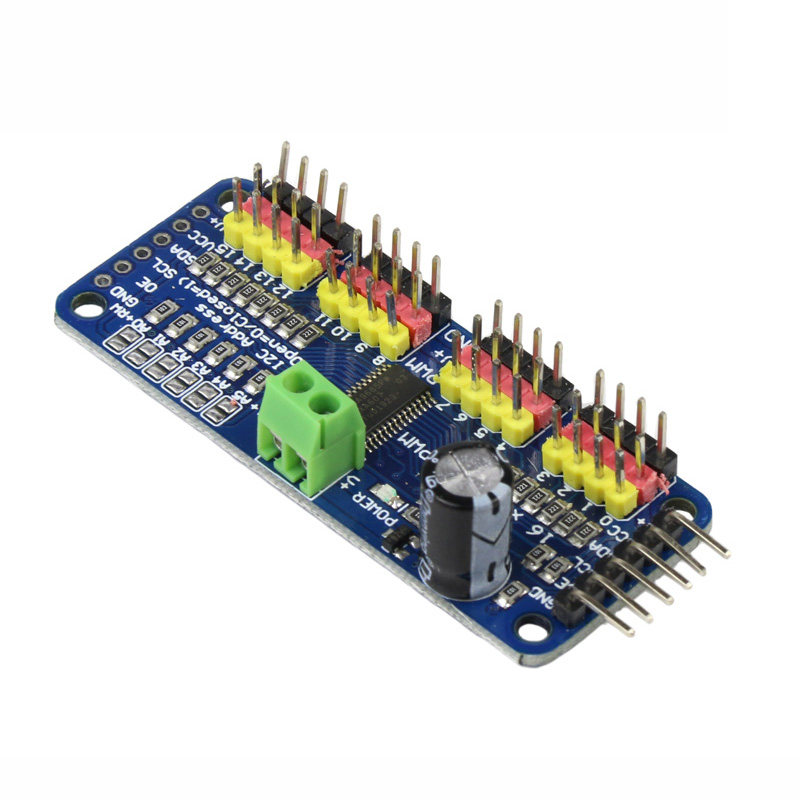
16 Road Pwm Drieve Drive Drive Board Robot Controller Interface Module Module PCA9685 Драйвер





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара
- Рулевой механизм, драйвер, модуль




- Информация о товаре
- Фотографии
| Цвет: | Рулевой механизм, драйвер, модуль |


|
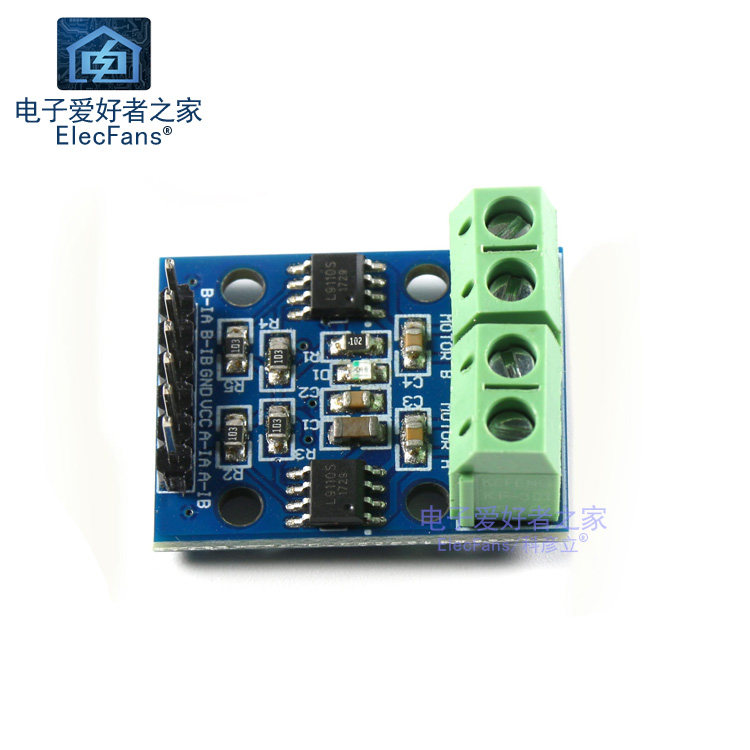
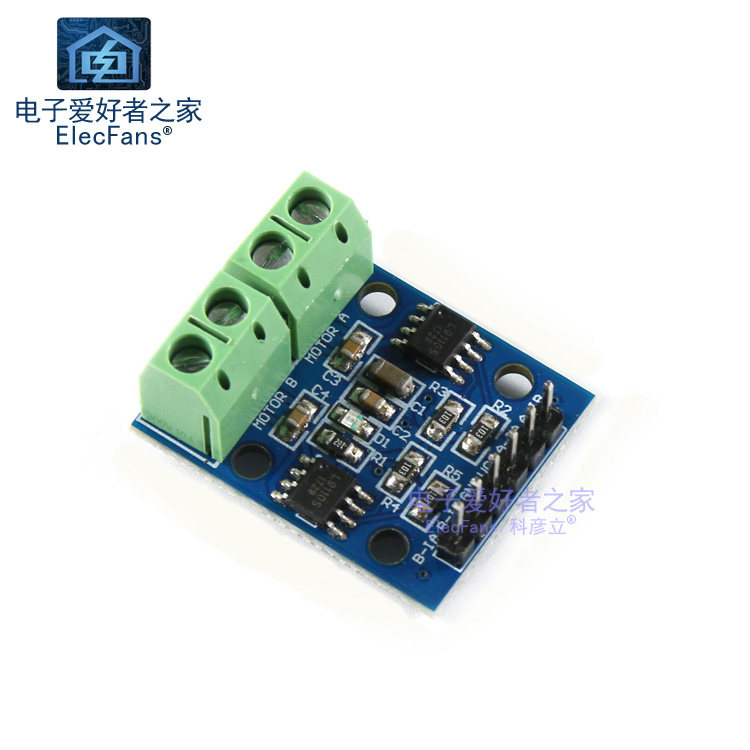
один  Описание модуля
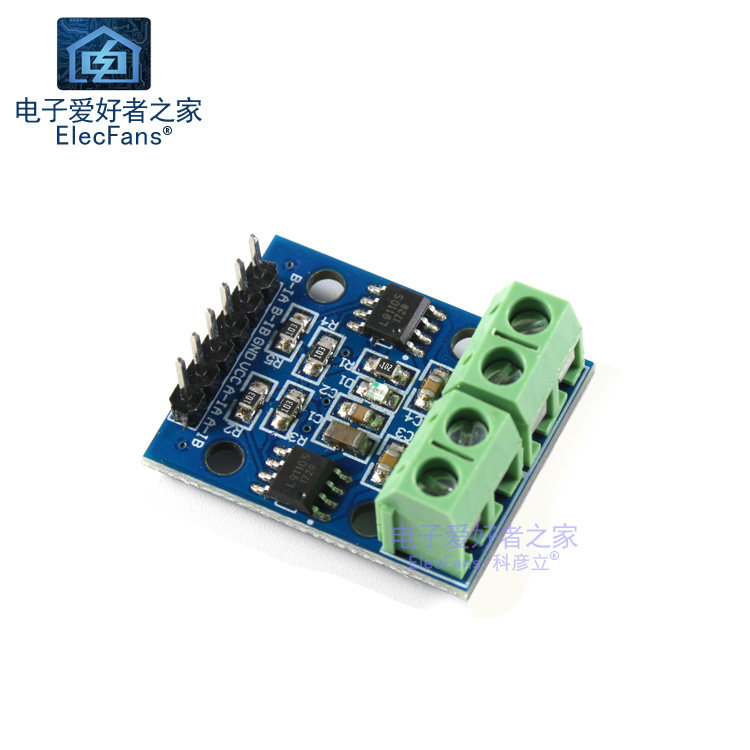
1  Dual L9110S Драйвер двигателя чипа
2 Модульный источник питанияНапряжение: 2,5-12 В.
3  подходящий диапазон двигателей: от 2,5 В 12 В двигателя, максимальный рабочий ток составляет 0,8А, текущее напряжение интеллектуального автомобиля и ток на рынке находятся в этом диапазоне
4  может одновременно управлять 2 двигателями DC,или1 4 -Line 2 -Step Step Motor.
5  размер платы PCB: 2,8 см*2,1 см.  Ультра -ломный объем, подходит для сборки
6  есть фиксированное отверстие для установки, диаметр: 3 мм
два  Описание интерфейса модуля
【6p Инструкции по черной изгибающей игле】
1 VCC   внешний2.5V-12V напряжение
2 GND   внешний GND
3 IA1 Внешняя одиночная машинаIo порт
4 IB1 Внешняя одиночная машинаIo порт
5 IA2 Внешняя одиночная машинаIo порт
6 IB2 Внешняя одиночная машинаIo порт
[4p Зеленый терминал Описание]
1 OA1 OB1  2 штифты двигателя постоянного тока, без направления
2 OA2 OB2  2 штифты двигателя постоянного тока, без направления
три МодульИнструкции по использованию
Включите VCC, GND  индикатор модуля света модуля света
IA1Введите высокий уровень,IB1Введите низкий уровень, двигатель A Мотор вращается;
IA1Введите низкий уровень,IB1Введите высокий уровень,MOTOR A изменение двигателя;
IA2Введите высокий уровень,IB2Введите низкий уровень,Двигатель B вращается;
IA2Введите низкий уровень,IB2Введите высокий уровень,Мотор B Моторный реверс;
Четыре программа тестирования
int b1=11;
int a2=10;
int b2=12;
int c1=7;
int d1=5;
int c2=8;
int d2=6;
void setup()
{
pinMode(a1,OUTPUT);
pinMode(a2,OUTPUT);
pinMode(b1,OUTPUT);
pinMode(b2,OUTPUT);
pinMode(c1,OUTPUT);
pinMode(c2,OUTPUT);
pinMode(d1,OUTPUT);
pinMode(d2,OUTPUT);
}
void loop()
{
for(char i=0;i<10;i++)
{
digitalWrite(a1,HIGH);
digitalWrite(a2,LOW);
digitalWrite(b1,HIGH);
digitalWrite(b2,LOW);
digitalWrite(c1,HIGH);
digitalWrite(c2,LOW);
digitalWrite(d1,HIGH);
digitalWrite(d2,LOW);
delay(50);
}
for(char i=0;i<10;i++)
{
digitalWrite(a1,LOW);
digitalWrite(a2,HIGH);
digitalWrite(b1,LOW);
digitalWrite(b2,HIGH);
digitalWrite(c1,LOW);
digitalWrite(c2,HIGH);
digitalWrite(d1,LOW);
digitalWrite(d2,HIGH);
delay(50);
}
}