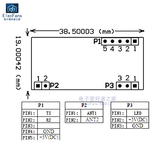
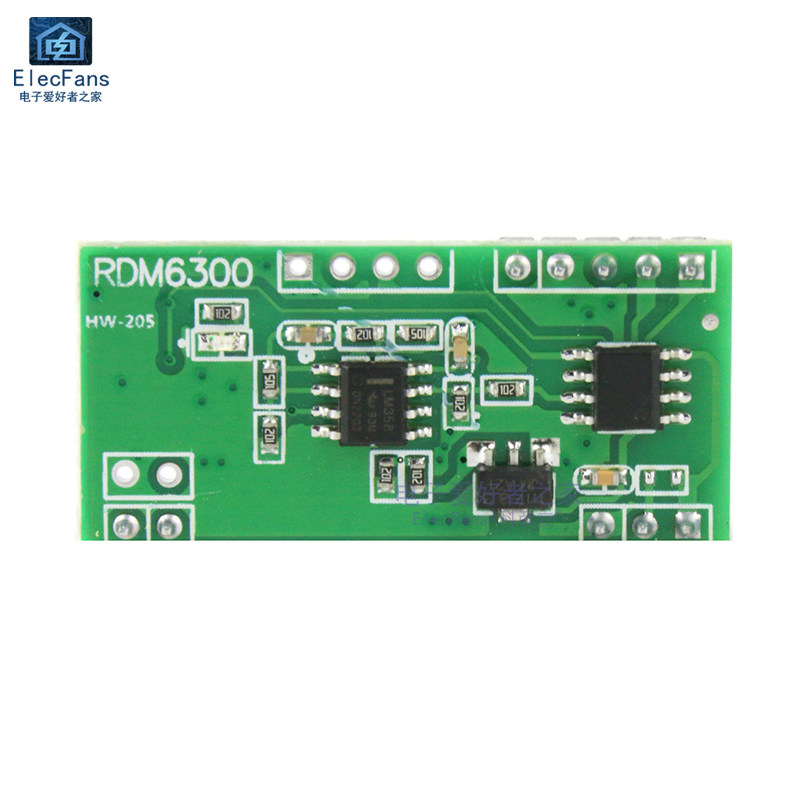
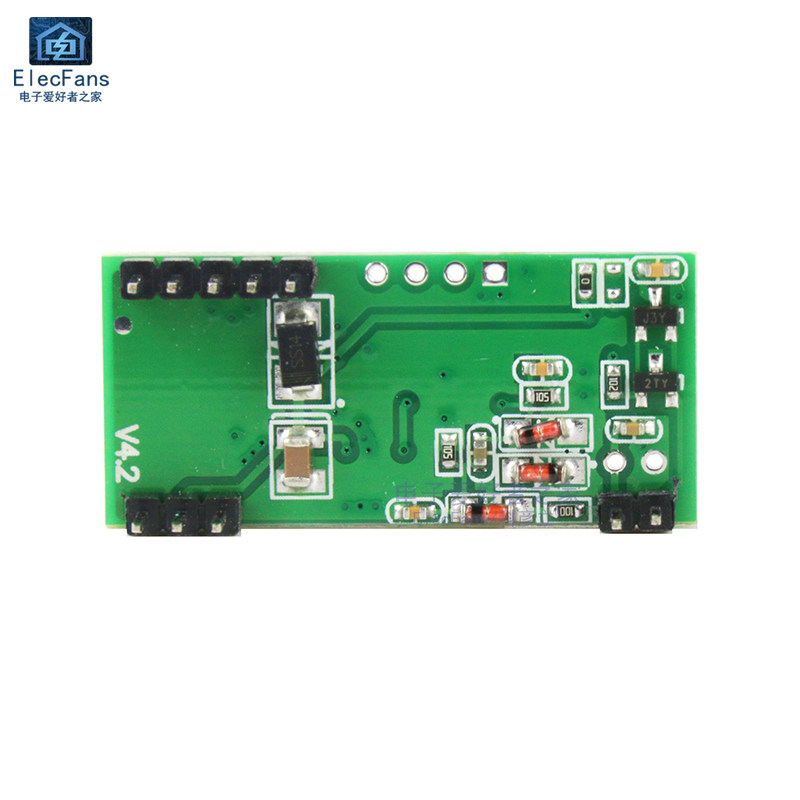
RDM6300 RF модуль RFID Read and Write Reader UART Serial Output Выход непосредственно считывает 125 кГц




Цена: 370руб. (¥14.5)
Артикул: 648832445524
Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товараПродавец:电子元器件爱好者家用元器件电子元器件套件元器件
Рейтинг:
Всего отзывов:0
Положительных:0
Выберите вариацию / цвет
Добавить в корзину
Другие товары этого продавца




¥9.8208руб.
¥1.532руб.
¥0.715руб.
¥1.532руб.



шаг
1Напишите прошивку:
Сначала запишите этот код доступа для Nano, потому что мы являемся интерфейсом Micro, поэтому используйте USB -кабель Micro USB.
Чистый код, не нужно звонить в библиотеку, конечно, код может быть оптимизирован, это будет предоставлено всем для улучшения.
Длинный пароль1 = 1111111; // позже переключить на карту № 1
длинный пароль2 = 2222222; // позже переключиться на карту № 2
int flag = 0, rx_flag = 0; // Логотип последовательного порта
Код Char [14]; // используется для хранения чтения данных последовательного порта
длинный num = 0; // декодирование данных
int service = 7; // Определение штифтов рулевого механизма
int Door=0;
void Read_ID(void)
{
int i=0;
char temp;
for(i=0;(Serial.available()>0); i ++) // Серьезно
//while(Serial.available()>0)
{
temp=Serial.read();
Serial.print(temp);
delay(2);
Serial.println(i);
if(temp==0X02) // Получить начальную позицию
{
flag=1;i=0;RX_Flag=0;//
}
If (flag == 1) // Обнаружение начального бита, запустите получение данных
{
if (temp == 0x03) // обнаруживается конечный код,
{
flag=0; //
if (i == 13) rx_flag = 1; // 13 -й цифры - это конечный код, получить данные, подписать 1
else RX_Flag=0;
break;
}
Code[i]=temp;
}
}
Flag = 0; // знак явно нулевой
}
void pulse( int serpin,int angle)
{
Int width; // выходной импульс рулевой передачи
ширина = (угол*11) +500; // преобразовать угол в 500-2480
DigitalWrite (Serpin, High); //
задержкамикросекунд (ширина); // Микросекундное число задержки ширины импульса
DigitalWrite (Serpin, Low); // Поместите скорость интерфейса рулевого механизма на низкий
delay(20-width/1000);
}
void setup()
{
pinMode(13,OUTPUT);
pinMode(serpin,OUTPUT);
Serial.begin(9600);
Serial.println("Этот тест ISA для системы управления доступом");
delay(100);
Serial.println(Password1);
}
void loop()
{
int i;
long temp=0,time=0;
RX_Flag=0;
while(1)
{
Read_ID();
if(RX_Flag==1)
{
for(i=5;i<11; i ++) // Декодирование данных, 6 -битные символы обращаются к шестнадцатеричным числам, что соответствует номеру десятичной карты
{
Num<<=4;
if(Code[i]>64) Num+=((Code[i])-55);
else Num+=((Code[i])-48);
Serial.println(Num);
}
Serial.println(Num);
If (num == password1) (num == password2) //
{
digitalWrite(13,HIGH);
delay(5);
for(int i=0;i<= 50; i ++) // Дайте достаточно времени, чтобы повернуть его на указанный угол
{
Импульс (служба, 20); // Спортивный импульс
}
delay(2000);
while(analogRead(Door)>400);
delay(1000);
digitalWrite(13,LOW);
delay(5);
for(int i=0;i<= 50; i ++) // Дайте достаточно времени, чтобы повернуть его на указанный угол
{
Импульс (Serpin, 180); // Спортивный импульс
}
}
// else Определите неудачу
// {
// digitalWrite(13,LOW);
// for(int i=0;i<= 50; i ++) // Дайте достаточно времени, чтобы повернуть его на указанный угол
// {
// Импульс (Serpin, 90); // Спортивный импульс
// }
// }
while(Serial.read()>0); // очистить область кэша
Rx_flag = 0; // логотип ясно Zero
Num = 0; // Data Clear Zero
}
}
}


