CNC Shield v3 Evanors Extension 3D Printer A4988





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара







 один, Описание продукта
один, Описание продукта
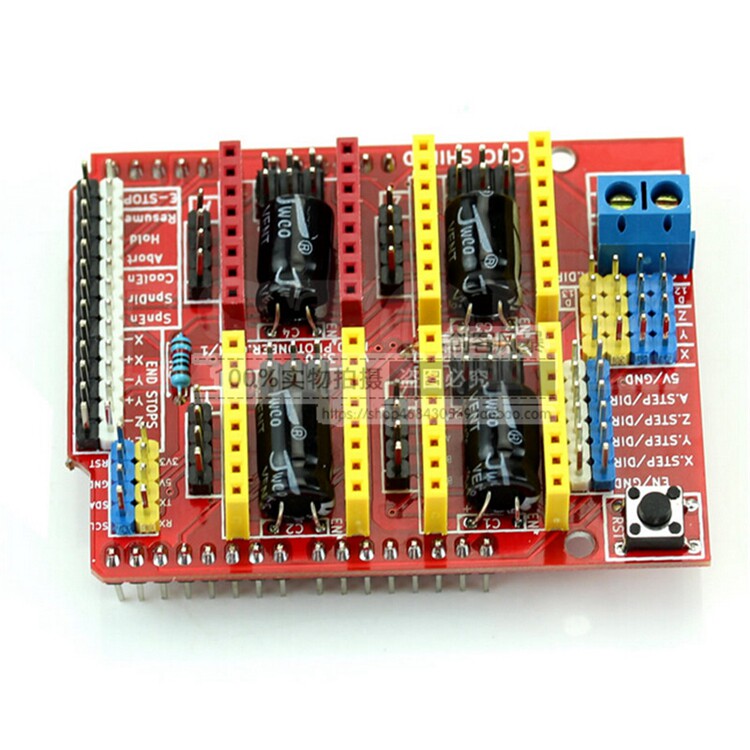
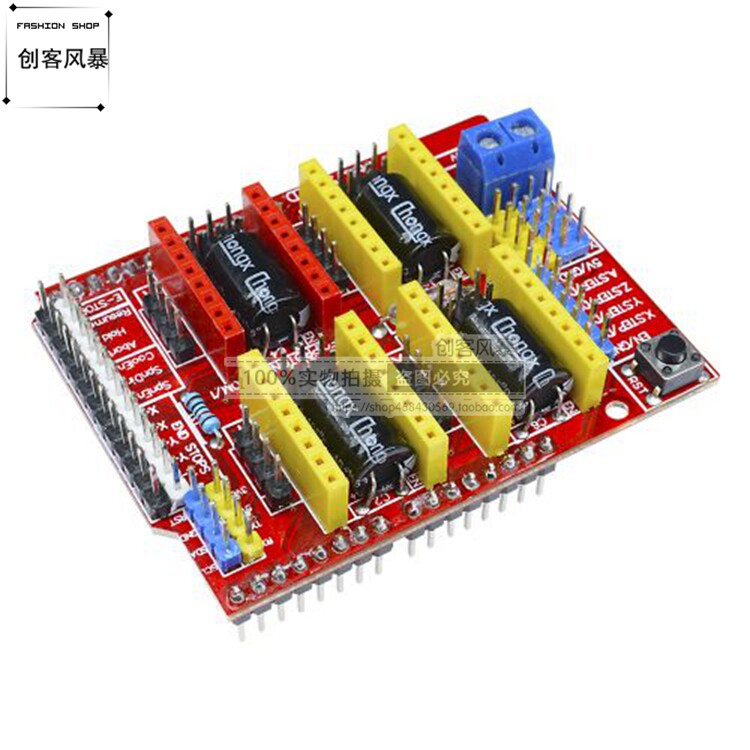
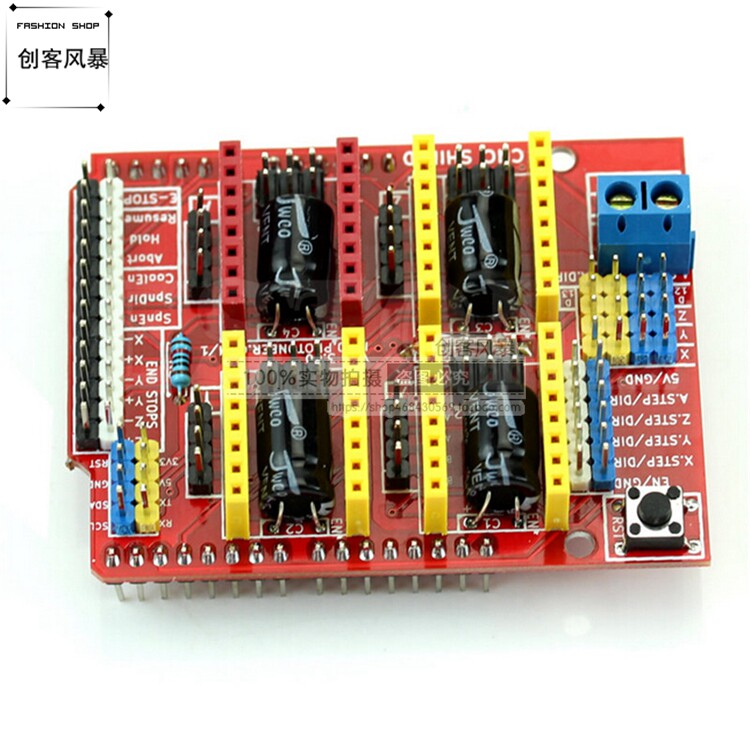
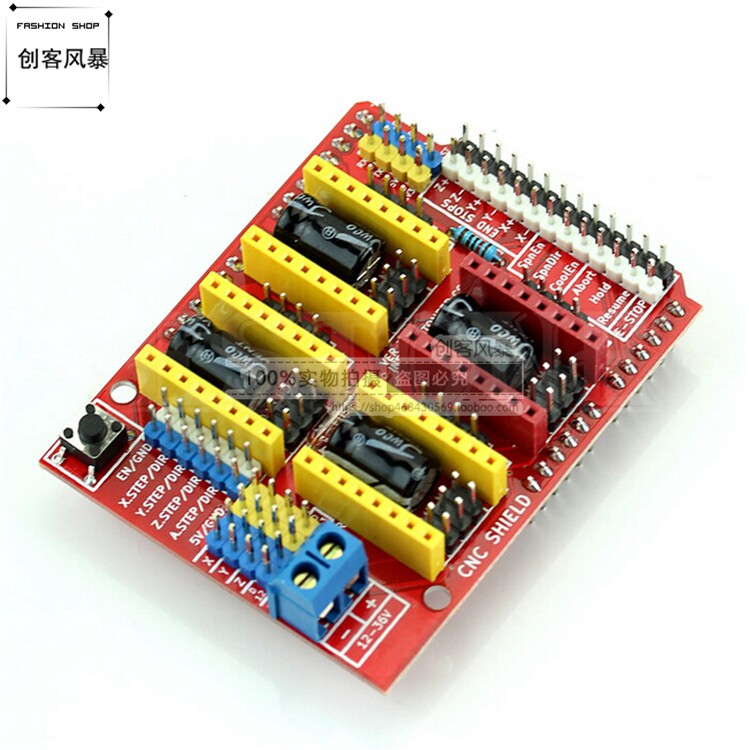
Эта расширенная плата может быть использована в качестве резьбы,3DПринтер и другие расширения драйверов, в общей сложности4Слот модуля дорожного шага моторного привода ((Обратите внимание, что эта доска не включаетA4988Модуль вождения шага, вам нужно купить его отдельно в нашем магазине), Можно управлять4Дорога не попадает в мотор, и каждый шаг требуется только для входа в мотор2индивидуальныйIOРот, то есть6индивидуальныйIOВы можете хорошо управлять3Встаньте в мотор, очень удобно, что прощание с традиционной работой двигателя является громоздкой.
два,UNO МодульIOВведение в соответствующие отношения
Основные требуемые контрольные контакты ступенчатого двигателя, другие булавки являются резными машинами, или3DОн используется только тогда, когда используется принтер.IOСоответствует рисунке выше.
Arduino Uno ----------------------------------------------------- ------------------------------------------------------ --------
8 ------------------------ EN В
7 ----------------------- Z.Dir (управление направлением вала)
6 ----------------------- Y.dir (управление направлением оси)
5 ----------------------- X.dir (управление направлением оси x)
4 ---------------------- Z.Step (шаг управление осью Z)
3 ---------------------- Y.step (шаг управление оси y)
2 ---------------------- X.step (управление шагом x -оси)
// Ниже приведена простая программа управления двигателем Step,
#define EN 8 // Stepping Motor для включения конца, низкий уровень эффективен
#define X_DIR 5 // x Ось Управление направлением двигателя шага
#define Y_DIR 6 // y ось Управление направлением двигателя шага
#define Z_DIR 7 // z ось Управление направлением двигателя шага
#define X_STP 2 // x Ось Шаг контроль
#define Y_STP 3 // y ось Шаг контроль
#define Z_STP 4 // z ось Шаг контроль
/*
// функция: шаг Функция: управляйте направлением двигателя, количество шагов.
// Параметры: Dir Управление направлением, Дирпин соответствует Соответствует шагам мотора, steps Поместив шаги
// нет возврата значения
*/
void step(boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite(dirPin, dir);
delay(50);
for (int i = 0; i < steps; i++) {
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
void SETUP () {// Установить трубопроводную ногу ввода
pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
pinMode(Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(EN, LOW);
}
void loop(){
step(false, X_DIR, X_STP, 200); // x электрический Обратный 1 круг, 200 шагов - это круг
step(false, Y_DIR, Y_STP, 200); // y -оси двигатель Обратный 1 круг, 200 шагов - это круг
step(false, Z_DIR, Z_STP, 200); // z мотор оси Обратный 1 круг, 200 шагов - это круг
delay(1000);
step(true, X_DIR, X_STP, 200); // x электрический 1 круг, 200 шагов - это круг
step(true, Y_DIR, Y_STP, 200); // y -оси двигатель 1 круг, 200 шагов - это круг
step(true, Z_DIR, Z_STP, 200); // z мотор оси 1 круг, 200 шагов - это круг
delay(1000);
}
Экспериментальный феномен: ступенчатый двигатель меняет круг, паузу на 1 секунду, а затем кружок, так что цикл.
Стоит отметить, что при вставке модуля A4988 будьте осторожны, чтобы не вставить его. Шаг шага -двигателя:
2A ,2B Для группы (красный, зеленый), 1A, 1B - это группа (синий, желтый), хочет изменить направление и изменить положение одной из групп, таких как 2A, обмен с 2B.