Mini USB 24 Rider Rider Steler Controller Board STESSIDE DIVES USC-24 (отправляющая линия)






Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара








Arduinosb Mini USB 24-канальный сервопривод Сервоуправления Servo Servo USC-24 (линия отправки)
Программное обеспечение уже включает в себя три языка: упрощенный китайский, традиционный китайский и английский (с линией)
Инструкции по использованию платы управления рулевым управлением (вся информация выше)
 Вы можете одновременно управлять до 16 сервоприводов, которые могут управлять программным обеспечением на ПК. Используется последовательный порт уровня TTL) Отправить команды для управления рулевым механизмом.
  Самые большие преимущества этого продукта: независимо разработанные, могут одновременно управлять 16-канальными сервоприводными двигателями, с высокой точностью (1US), могут контролировать скорость вращения серво-серво-двигательных двигателей. Он достиг способности нескольких сервоприводов работать одновременно, используя 32-разрядные процессоры, импортируемые из Соединенных Штатов, обладает интегрированным интерфейсом USB-связи внутри, использует AT24C512 SOP8, импортированный из Соединенных Штатов в качестве EEPROM (Flash), чтобы сохранить данные действий, чрезвычайно стабильный, и имеет независимую конструкцию конструкции 16-канальных сервисов (нет фенолиона концентрации). Полем Полем
Serial.print("#1P800T1000rn");   // S1 Сервуат вращается в положение с шириной импульса 800, а время использования составляет 1000 мс.
delay(1000); // задержка 1000 мс, сервоприводы только что закончили выполнять предыдущую команду
Ремесло ПХБ: химическая технология тонущего smt patch сварка процесс   безопаснее и стабильно
Параметры продукта:
1. Диапазон питания управления чипами: 6,5 В ~ 12 В или 4,5 В ~ 5,5 В.(Почему есть два диапазона? Потому что есть два входа) (USB может включить чип платы управления рулевым механизмом, автоматически выбирать и обеспечить обратную защиту USB, что может защитить ваш компьютер от сжигания обратным напряжением USB)
2. Часть диапазона источника питания: DC DC (напряжение связано с параметрами рулевого механизма и обычно использует 5 В постоянного тока).
3. Канал управления: одновременно управление 16.(Скорость рулевого механизма является точной и регулируемой, а движение робота гладкое и свободное)
4. Ввод связи: USB или последовательный порт (TTL, USART).(Вы можете использовать беспроводной модуль Bluetooth или другие беспроводные модули для выполнения беспроводного управления на контроллер рулевого управления)
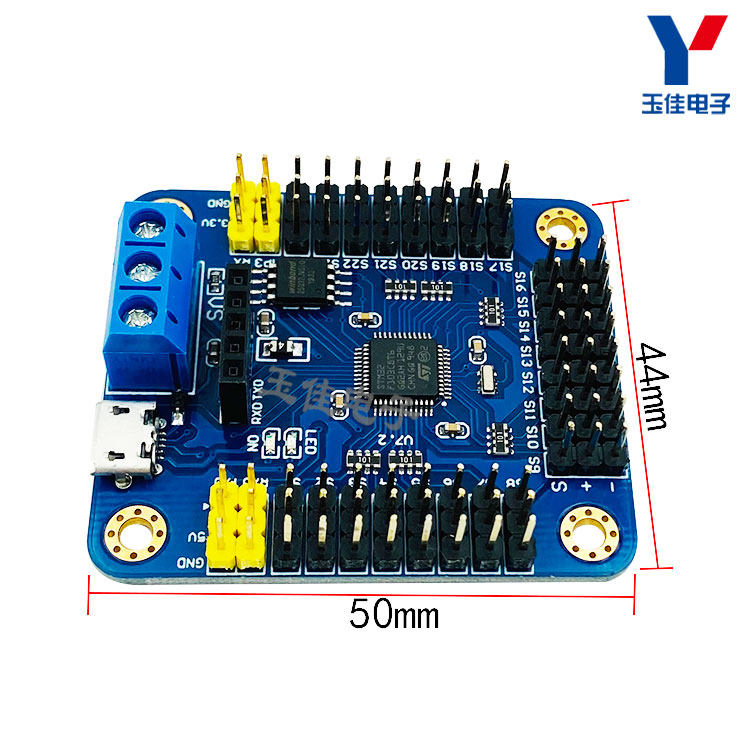
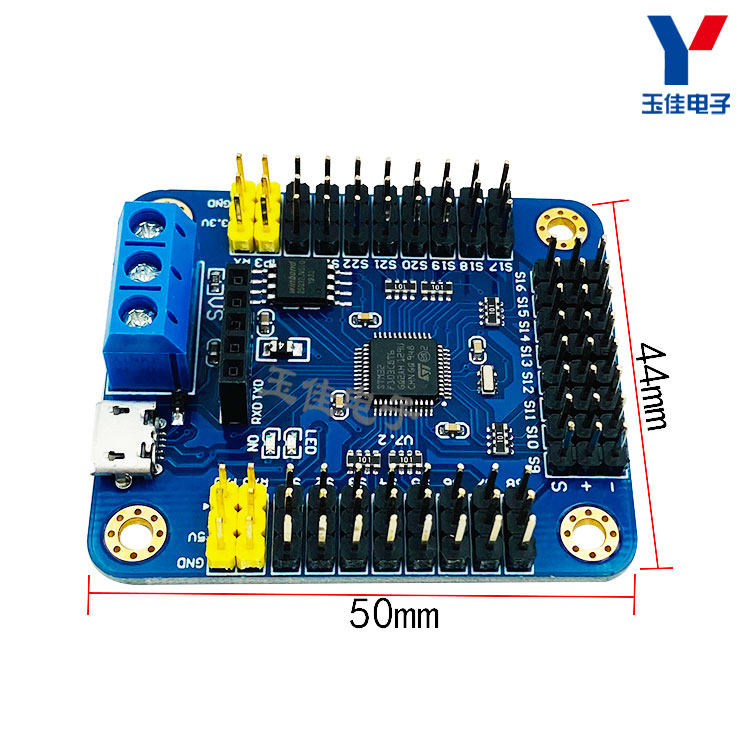
5. Выход сигнала: ШИМ (Точность 1US).
6. Сервореляционное разрешение: 1US, 0,09 градусов.
7. Диапазон тарифов Поттера: 9600 19200 38400 57600 115200 128000.(Полностью автоматически идентифицируйте, не нужно устанавливать)
8. Поддержка сервоприводов: Futaba или HiTec и домашние бренды, такие как Huisheng и т. Д., Убейте все рулевые снаряжения, контролируемые сигналами PWM.
9. PCB Размер: 51 мм×43.5mm&раз; 1,6 мм (монтажное расстояние отверстий: 42*35,5 мм).
10. Метод управления: USB и последовательный порт (TTL) принять методы команды.(Прикреплено к USB -кабелю данных и программному обеспечению управления верхним компьютером, программное обеспечение может быть обновлено в любое время)
11.flash: 512K Рим.(Если каждая команда контролируется одновременно, можно сохранить более 500 инструкций. Если команда короткая, это не проблема сэкономить тысячи статей)