STM32 F405 управление полетом Betaflight OSD Bec



Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара
- F4V3 REVO
- F4V2 Shell
- Многоо ось





| Типы самолетов: | Многоо ось |
| Цвет: | Omnibus F4 Flying Control, F4V2 Shell, F4V3 REVO |
Управление полетом с открытым исходным кодом, не предоставляйте техническую поддержку, осторожно размещены новички.
Если управление полетом DIY не возвращается, если он сварен, пожалуйста, не сдавайте сварки после получения товара.Подключение успешно представляет обычный управление полетом.После сварки это влияет на вторичные продажи, и магазин отказывается возвращать и обмениваться, и получать только техническое обслуживание.




 Новая Omnibus F4 Pro (V2) AIO Crossing Machine Machine Control Betaflight Program -модуль питания функциональной полосы OSD BECE BEC
Новая Omnibus F4 Pro (V2) AIO Crossing Machine Machine Control Betaflight Program -модуль питания функциональной полосы OSD BECE BEC
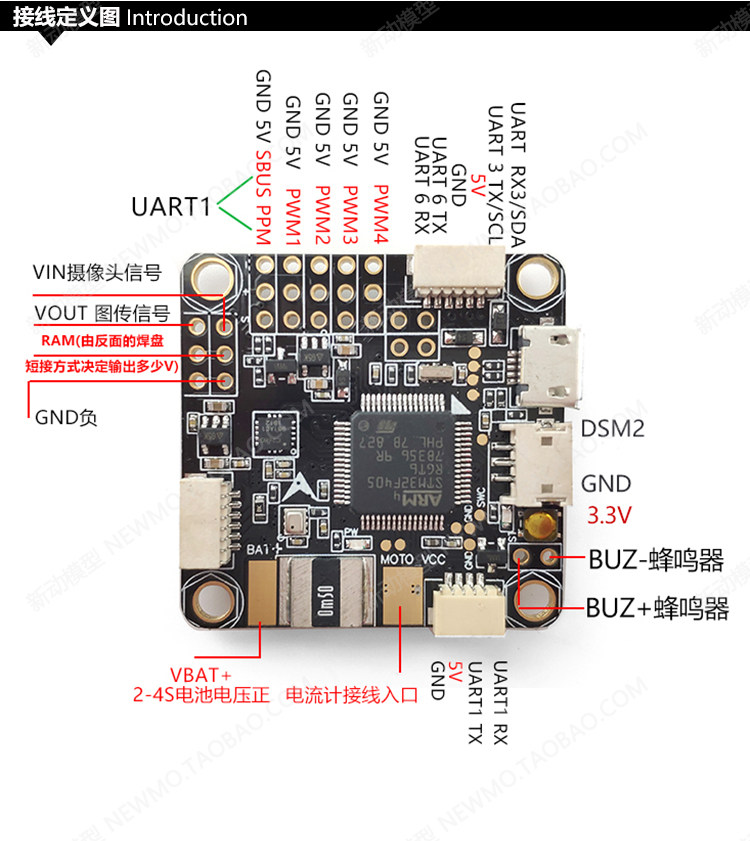
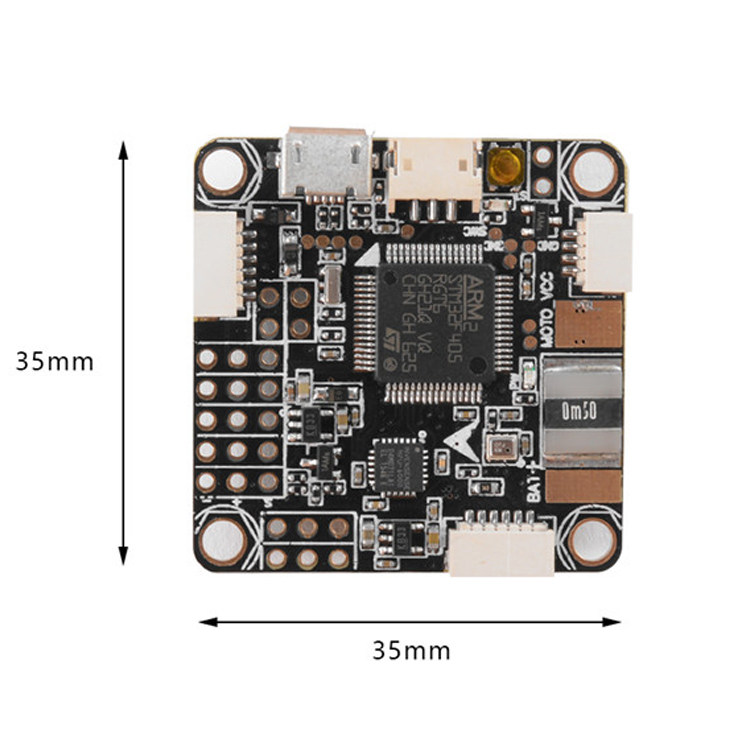
Название продукта: Betaflight Omnibus F4 Pro (V2) контроллер полета
Размер: 35x35 мм
Установленные отверстия: 30,5x30,5 мм
OMNIBUSF4 характеризуется интеграцией программ управления полетом и OSD в MCU, без дополнительного управления MicroComputer Control OSD, а также программное обеспечение для настройки OSD также интегрировано с настройкой управления полетом. Удобство, используйте датчик MPU6000 и подключите к шине SPI, увеличивает скорость отбора проб датчика, улучшит рабочую частоту основной программы управления MCU, обеспечивает более высокую точность управления и более высокую скорость отклика, встроенный модульный модуль BEC, нет внешнего соединение, более удобное в использовании.
Аппаратные параметры:
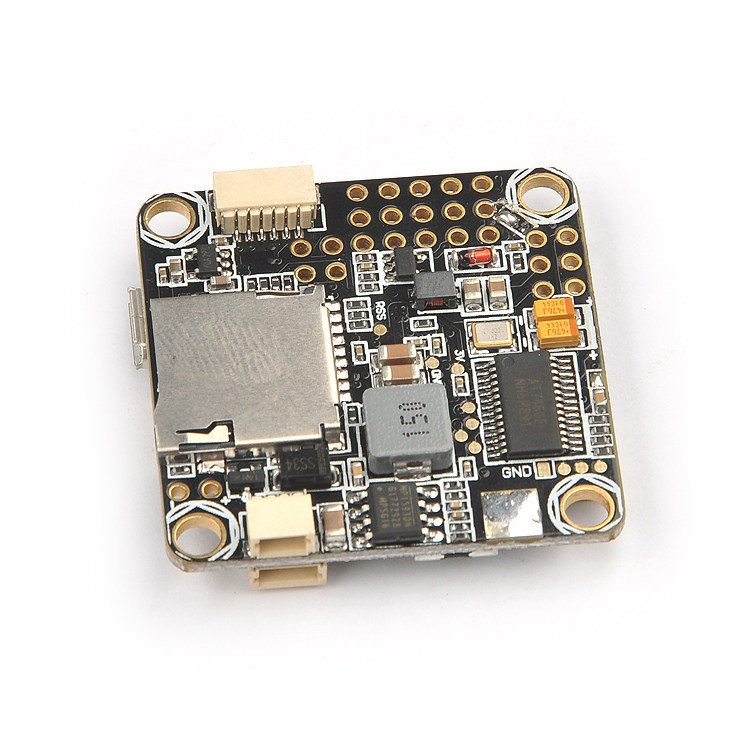
STM32 F405 MCU Одиночная машина
BMB280 BMP280
датчикic268G
Стандартная SD -карта c слот
Одиночный микрокомпьютер управляет чипом OSD через режим DMS SPI Bus, быстрее
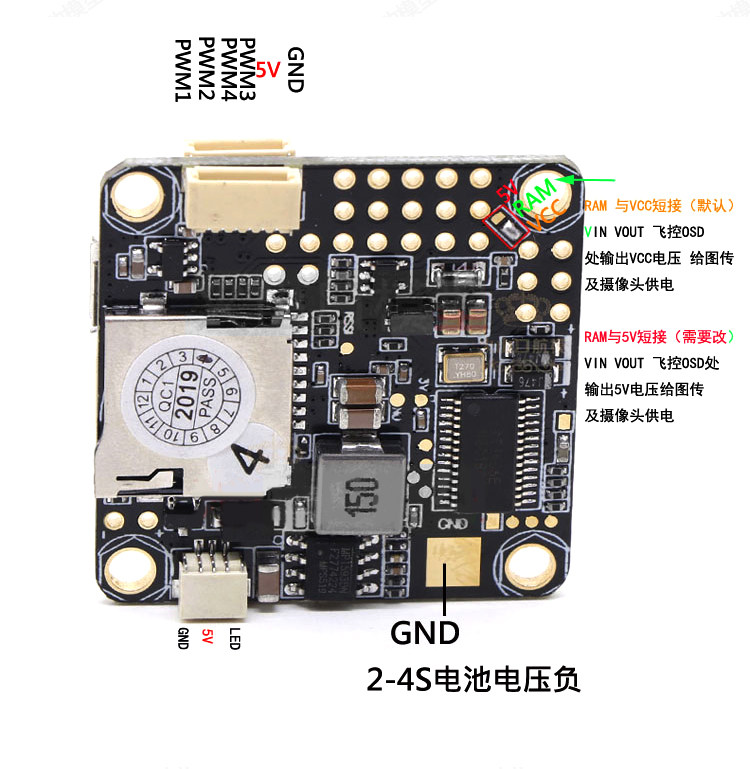
Встроенный -В модуле питания BEC, без внешнего соединения, простой в использовании.
Не поддерживается: прошивка PX4
Для получения дополнительной информации, пожалуйста, см.
https://github.com/betaflight/betaflight/releases
http://dronin.org/
