Официальный веб -сайт подлинный магнитный потоковой жидкость Интеллектуальная технология торможения и его применение DAOMNAG





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара






Основная информация | |
наименование товара: | Магнитная жидкость интеллектуального торможения и ее применение |
делать К: | Ван Дейон Кукольный Ван Яун |
город поле цена: | 89.00 Юань |
ISBN Номер: | 9787111688556 |
Страница число: | 225 |
вне Версия общество: | Машиностроительная промышленность Пресса |
Оглавление |
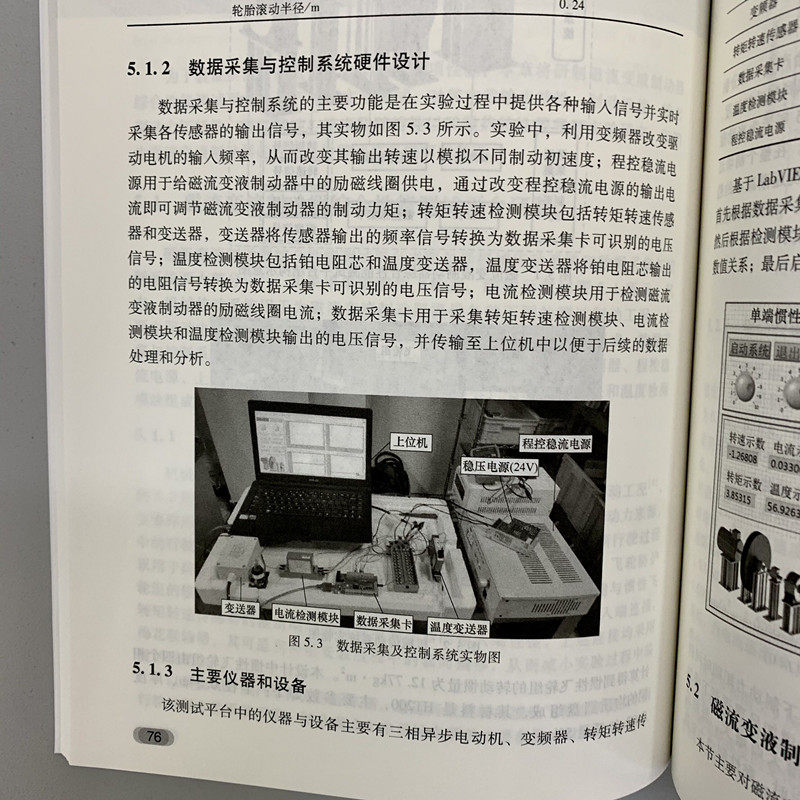
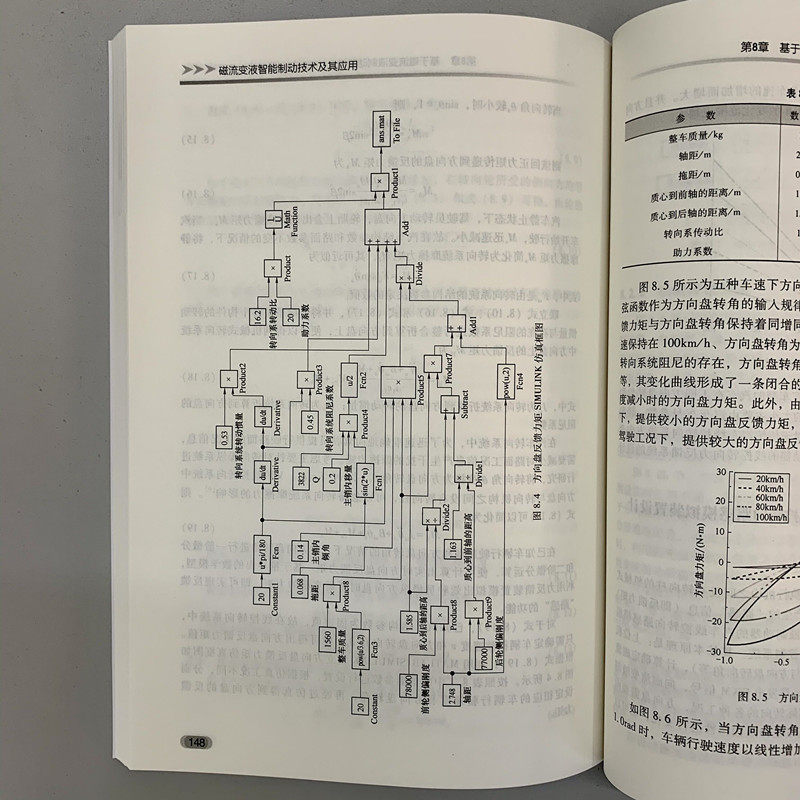
Предисловие Глава 1. Введение 1.1 Основная концепция и обзор развития магнитореологической жидкости 1.1.1 Основной состав магнитореологической жидкости 1.1.2 Основные характеристики магнитореологической жидкости 1.1.3 Обзор разработки магнитореологических жидкостей 1.2 Обзор исследований магнитореологического жидкостного тормоза 1.2.1 Принцип работы 1.2.2 Состояние исследований магнитореологических жидкостных тормозов 1.3 Обзор применения магнитореологического жидкостного тормоза 1.3.1 Применение магнитореологических жидкостных тормозов в транспортных средствах 1.3.2 Применение магнитореологических жидкостных тормозов в области робототехники 1.3.3 Применение магнитореологических жидкостных тормозов в других областях Рекомендации Глава 2 Дизайн дегенерации магнитного потока и многоцелевой оптимизации 2.1 Маленький крутящий момент для отдельного диска магнитного потока Конструкция и анализ 2.1.1 Структурный проект 2.1.2 Моделирование тормозного момента 2.2 Большой крутящий момент, разработанный магнитно -потоковой жидкостью и многоцелевой оптимизация 2.2.1 Теоретический анализ 2.2.2 Анализ плана эксперимента 2.2.3. Рекомендации Глава 3 Многофизическое имитационное исследование фермерских хозяйств на магнитном Stam -Transformer 3.1 Моделирование электромагнитного поля жидкого тормоза магнитного потока 3.1.1 Установка модели моделирования электромагнитного поля 3.1.2 Настройки атрибута материала и разделение сетки 3.1.3 Настройки и нагрузки пограничного условия 3.2 Анализ моделирования температурного поля температуры магнитного жидкости тормоза 3.2.1 Модель математики мгновенной температурной поля математики 3.2.2 Модель моделирования поля мгновенной температуры 3.2.3 Результаты и анализ моделирования поля температуры 3.3 Анализ моделирования поля с магнитным жидкостью и моделирования поля теплового деформации 3.3.1 Результаты и анализ моделирования теплового напряжения 3.3.2 Результаты и анализ тепла должны быть изменены 3.4 Анализ магнитного потока трансформатор жидкие тормоза 3.4.1 Результаты и анализ моделирования поля скорости и анализа конвейера рассеивания тепла 3.4.2. Рекомендации Глава 4 Исследование стратегии управления стабильностью тормозной силы магнитореологического жидкостного тормоза 4.1 Математическая модель управления тормозной силой 4.2 Традиционная конструкция ПИД-регулятора, основанная на методе Z-N 4.2.1 Традиционный принцип ПИД-регулирования 4.2.2 Конструкция ПИД-регулятора магнитореологического жидкостного тормоза 4.2.3 Настройка параметров ПИД на основе метода Z-N 4.3 Проектирование ПИД-регулятора на основе нейронной сети БП 4.3.1 Структура нейронной сети БП 4.3.2 Структура регулятора BP-PID 4.3.3 Оптимизация нейронной сети BP на основе генетического алгоритма 4.4 Анализ результатов моделирования 4.4.1 Результаты моделирования под сигналом прыжка блока 4.4.2 Результаты моделирования по сигналу нарушения 4.5 Эксперимент по контролю устойчивости выходного тормозного момента магнитореологического жидкостного тормоза Рекомендации Глава 5. Экспериментальные исследования эффективности торможения и теплоотвода магнитореологического жидкостного тормоза 5.1 Разработка комплексной платформы для испытаний характеристик магнитореологических жидкостных тормозов 5.1.1 Механическая система трансмиссии 5.1.2 Сбор данных и управления сбором данных 5.1.3 Основные приборы и оборудование 5.2 Эксперимент по тормозному моменту и характеристикам реакции магнитореологического жидкостного тормоза 5.2.1 Испытание выходных характеристик на холостом ходу 5.2.2 Эксперимент по эффективности торможения 5.2.3 Эксперимент по характеристике выходного тормозного момента 5.2.4 Скорость после эксперимента 5.3 Температурные характеристики и эксперимент по рассеиванию тепла магнитореологического жидкостного тормоза 5.3.1 Эксперимент по температурной характеристике 5.3.2 Эксперимент по термическим характеристикам Рекомендации Глава 6. Исследование антиблокировочной системы автомобильных магнитореологических жидкостных тормозов 6.1 Схема стенда для моделирования тормозов транспортного средства 6.1.1 Основные принципы управления автомобилем и торможения 6.1.2 Структура и принцип работы стенда для моделирования торможения автомобиля 6.1.3 Расчет поступательной инерции автомобиля и конструкция инерционного маховика 6.1.4 6.2 Модели модели автомобиля и моделирование дорожного покрытия и моделирование дорожного покрытия 6.2.1 Модель автомобильной динамики тормозной динамики для автомобилей 6.2.2 6.2.3 Модель управления магнитореологического жидкостного тормоза 6.2.4 Модель контроллера тормозной системы против hug 6.2.5 Модель распознавания дорожного покрытия 6.2.6 Модель моделирования тормозного торможения в одном 6.2.7 Анализ моделирования торможения транспортного средства 6.3 CAR Magnetic STAM -Трансформаторы Противоизлучающие исследования имитации исследований 6.3.1 Стратегия управления торможением с помощью ABS 6.3.2Abs Анализ симуляции торможения 6.4 Экспериментальные исследования по антиблокировочной системе автомобильных магнитореологических жидкостных тормозов 6.4.1 Разработка экспериментальной системы 6.4.2 Эксперимент по калибровке магнитного порошкового сцепления 6.4.3 Эксперимент по отслеживанию коэффициента сцепления с дорожным покрытием 6.4.4 Эксперимент по моделированию торможения автомобиля 6.4.5 Эксперимент по торможению с ABS Рекомендации Глава 7 Датчик педали автомобильного тормоза жидкого тормоза трансформатора магнитного потока 7.1 Дизайн датчика педали с автоматическим тормозами 7.1.1 Конструктивное решение и принцип работы 7.1.2 Требования к симулятору датчика педали тормозной педали 7.1.3 Расчет выбора основных деталей 7.2 Базовый эксперимент по производительности и разработка текущего алгоритма управления в реальном времени 7.2.1 Основной эксперимент экспериментального эксперимента 7.2.2 Алгоритм контроля симуляции педалей тормозной педали 7.2.3. 7.3 Определение намерения торможения и разработка алгоритма вывода силы торможения 7.3.1 Классификация намерения торможения 7.3.2 Выбор параметров намерения торможения 7.3.3 Разработка алгоритма управления 7.4 Исследование эксперимента по симулятору педали -педали автомобильного тормоза 7.4.1 Эксперимент по управлению динамическим управлением педалей 7.4.2 Совместный контрольный эксперимент с автомобильным стендом для моделирования магнитореологического жидкостного тормоза 7.4.3 Эксперимент по алгоритму управления тормозом на основе LabVIEW Рекомендации Глава 8. Устройство моделирования рулевого управления по проводам на основе магнитореологического жидкостного тормоза 8.1 Анализ теории крутящего момента управления линейным рулевым управлением. 8.1.1 Источник источника крутящего момента от обратной связи по рулевой системе 8.1.2. 8.2 Разработка устройства электромеханического рулевого управления, имитирующего ощущение дороги автомобилей на основе магнитореологических жидкостных тормозов 8.2.1 Основная структура и принцип работы 8.2.2 Система механической передачи 8.2.3 Система сбора и управления информацией 8.3 Распознавание и управление режимами рулевого управления на рулевом колесе 8.3.1 Режим управления рулевым колесом 8.3.2 Моделирование и анализ режима переключения 8.4 Моделирование и экспериментальные исследования 8.4.1 Моделирование крутящего момента в сочетании с Carsim+Simulink 8.4.2 Эксперимент по эксплуатации магнитореологического жидкостного тормоза 8.4.3 Аппаратные эксперименты Рекомендации Глава 9 Исследования по проектированию перчаток данных и исследования управления обратной связью 9.1 Конструкция перчаток обратной связи с магнитным потоком 9.1.1 Биологическое строение и совместные движения пальцев 9.1.2 Отзыв магнитного потока Общая структурная конструкция перчаток данных перчаток 9.2 Исследование перчаток данных исследования федерации магнитных потоков данных 9.2.1 Общая структура регулятора тока 9.2.2 Конструкция схемы возбуждения катушки возбуждения магнитореологического жидкостного тормоза 9.2.3 Моделирование и анализ схемы BUCK 9.3 Исследование стратегии управления отслеживанием силы обратной связи 9.3.1 Установление передаточной функции устройства магнитореологической силовой обратной связи 9.3.2 Состав и моделирование стратегий контроля обратной связи 9.4 Экспериментальные исследования 9.4.1 Эксперимент по калибровке системы измерения датчика 9.4.2 Испытание работоспособности магнитореологического жидкостного тормоза 9.4.3. Исследование перчаток обратной связи с магнитной обратной связью. Рекомендации Глава 10. Учебный робот для активной и пассивной реабилитации рук на основе магнитореологического гидравлического тормоза 10.1 Структурный дизайн учебного робота для активной и пассивной реабилитации рук 10.1.1 Анализ биологических характеристик рук 10.1.2 Проектирование общей конструкции и разработка прототипа 10.2 Анализ кинематики и механики учебного робота для активной и пассивной реабилитации рук 10.2.1 Положительное решение кинематики 10.2.2 Анализ спортивного моделирования 10.2.3 Механический анализ 10.3 Дизайн системы управления роботом по реабилитации ручной работы 10.3.1 Структура системы управления 10.3.2 Конструкция пневматической схемы 10.3.3 Выбор оборудования системы управления 10.3.4 Решение передаточной функции управления 10.4 Эксперимент по производительности робота для тренировки активной и пассивной реабилитации рук 10.4.1 Испытание работоспособности пневматических искусственных мышц 10.4.2 Испытание работоспособности магнитореологического жидкостного тормоза 10.4.3 Тренировочный эксперимент по пассивной реабилитации 10.4.4 Тренировочный эксперимент по активной реабилитации 10.5 Тренировочный эксперимент по активной и пассивной реабилитации пальцев, основанный на распознавании намерения движения 10.5.1 Предварительная обработка сигнала поверхностной ЭМГ и извлечение признаков 10.5.2 Расшифровка силы захвата по сигналам ЭМГ 10.5.3 Тренировочный эксперимент по реабилитации на основе сигнала ЭМГ Рекомендации |
краткое введение |
Эта книжная система и всесторонне представляют новые результаты исследований интеллектуальной технологии торможения магнитного дегенерации потока и ее применения в области транспортных средств и роботов.Основное содержимое включает в себя конструкцию жидкого тормоза магнитного потока и многоцелевую оптимизацию, многофизическое исследование моделирования поля магнитного трансформатора потока, исследование стабилизации стратегии управления стабилизацией тормозной стабилизации в трансформаторе магнитного потока, производительность Экспериментальные исследования, Учебное пособие с жидким тормозной тормозной тормозной тормозной тормозной тормозной тормозной тормозной тормозной тормозной тормозной треском, на основе магнитного потокового тормозного тормозного тормозного тормозного тормоза, устройства управления управлением автомобильной линией -индуирование на основе магнитного потока трансформаторов потока обратной связи с конструкцией перчаток и исследования управления обратной связкой, Исследование управления обратной связкой,, и главный робот для тренировок по пассивной реабилитации на основе жидкого тормоза на основе магнитного потока.Содержание книги является информативным и всеобъемлющим, а теория и практика одинаково важны. Эта книга может быть использована исследователями и техниками -техниками, занимающимися технологией магнитного потока. машиностроение, машиностроение транспортных средств и робот -инженерия. |
