Данг Дангванг Кука (Kuka) Промышленное робот -программирование и операция Han Hongyu Chemical Industry Press Press Подличная книга



Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара


 1. Сильная актуальность.Сосредоточьтесь на программировании и эксплуатации промышленных роботов KUKA, уделяя особое внимание программированию на месте и автономному программированию, принимая во внимание основы применения, установку и отладку.2. Комбинация «точка-лицо». Он имеет полную систему знаний и может использоваться в качестве учебного материала; содержание также имеет определенную глубину и подчеркивает необходимость изучения прикладных навыков.3. Обратитесь к стандартам профессиональных навыков «Работник по сборке, наладке и техническому обслуживанию промышленных роботов» и «Работник по эксплуатации и наладке промышленных роботов», чтобы удовлетворить потребности читателей в получении уровней квалификации; в то же время он также опирается на требования национальных и межпровинциальных соревнований промышленных роботов, чтобы предоставить читателям рекомендации для участия в соответствующих соревнованиях.
1. Сильная актуальность.Сосредоточьтесь на программировании и эксплуатации промышленных роботов KUKA, уделяя особое внимание программированию на месте и автономному программированию, принимая во внимание основы применения, установку и отладку.2. Комбинация «точка-лицо». Он имеет полную систему знаний и может использоваться в качестве учебного материала; содержание также имеет определенную глубину и подчеркивает необходимость изучения прикладных навыков.3. Обратитесь к стандартам профессиональных навыков «Работник по сборке, наладке и техническому обслуживанию промышленных роботов» и «Работник по эксплуатации и наладке промышленных роботов», чтобы удовлетворить потребности читателей в получении уровней квалификации; в то же время он также опирается на требования национальных и межпровинциальных соревнований промышленных роботов, чтобы предоставить читателям рекомендации для участия в соответствующих соревнованиях.
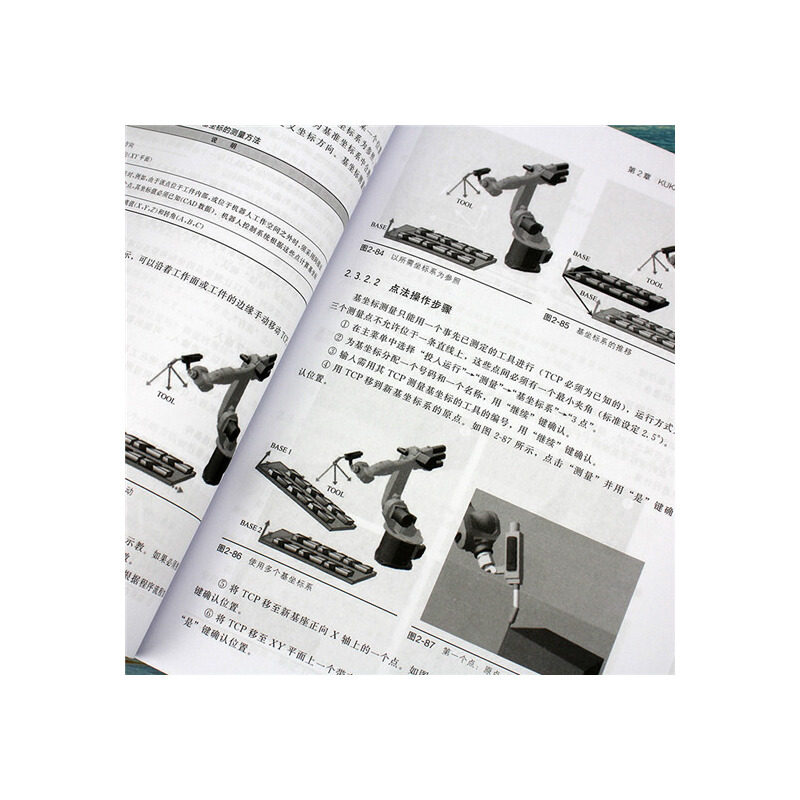
......Являясь высокотехнологичным интегрированным оборудованием, промышленные роботы предъявляют многоуровневые требования к профессиональным талантам.Основываясь на тенденциях развития робототехники и начиная с фактического производства, в этой книге подробно объясняются основы применения промышленных роботов, программирование и эксплуатация промышленных роботов KUKA на месте, программирование и эксплуатация WorkVisual, транспортировка и установка промышленных роботов KUAK, настройка и обслуживание промышленных роботов KUAK и т. д. Эта книга является очень практичной и справочной и может оказать помощь инженерно-техническому персоналу, занимающемуся эксплуатацией и обслуживанием промышленных роботов.Его также можно использовать в качестве справочного материала для преподавателей и студентов, специализирующихся в области машиностроения, электротехники и робототехники в общеобразовательных колледжах, университетах и профессиональных колледжах.............