Проектирование и реализация четвертого ротора самолетов





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара




 В настоящее время исследование воздушных роботов в основном проводится вокруг самолета с микро -беседом. Дауны.И в практических приложениях, из -за высокой степени гибкости и сильной адаптивности, микро -беспристрастные самолеты имеют обширные перспективы применения в военном и гражданском использовании.
В настоящее время исследование воздушных роботов в основном проводится вокруг самолета с микро -беседом. Дауны.И в практических приложениях, из -за высокой степени гибкости и сильной адаптивности, микро -беспристрастные самолеты имеют обширные перспективы применения в военном и гражданском использовании.
В зависимости от принципа структуры и полета беспилотные самолеты делятся на два типа.Первый -это починить дрон крыльев, а беспилотник с фиксированным ходом делится на пропеллеры и струйные дроны. Различное воздушный поток и давление воздуха в крыле производят подъемник для поддержания полета дронов; вторым является дророн ротора, дрон, Количество ротора может быть одним или несколькими, в исследовании изучается исследование «проектирования и реализации и ротора самолетов». Вращение с высокой скоростью одного или нескольких пропеллеров для генерации подъема. Если это множественные пропеллеры, необходимо поддерживать баланс посредством сотрудничества множества пропеллеров. Характеристики шестилега направления свободы, характеристика ротора. Дрон* -это то, что он может взлететь и повесить на землю. По сравнению с фиксированным беспилотником, он имеет хорошую подвижность, требования к месту встречи также небольшие. Очень широкие.
Как носитель, самолет Quadrocrrifite может добавлять различные функции на основе реальных функций полета, что является одним из очарования самолета Tower.В дополнение к общим функциям воздушной стрельбы, в последние годы появляются различные новые виды беспилотников, такие как беспилотники для селфи, беспилотники по защите сельскохозяйственных растений и курьеров.Внутреннее точное позиционирование беспилотников, разработанных крупными исследовательскими учреждениями, могут обеспечить более утонченную работу, такую как использование беспилотников для построения вертикальных деревень, и беспилотники для сбора совместных полетов.
Тем не менее, основание реализации этих сложных функций заключается в реализации основной функции полета беспилотника, главным образом для реализации независимого баланса (1) четырехлета самолета ротора. Полет и сложности в эксплуатации. (3) Самолет Терера Использование Дополнительные датчики для достижения фиксированной точечной суспензии и управления смещением без дистанционного управления. Это основа для достижения независимой функции полета самолета ссохи.
Для начинающих внедрение базовой функции полета самолета башни трудна. Он должен не только собрать оборудование четырехлетнего квадробического самолета в соответствии с принципом полета и обеспечить, чтобы самолет может летать безопасно и стабильно на аппаратном обеспечении. Уровень. В то же время дизайн программного обеспечения, особенно более сложный базовый дизайн программного обеспечения.Кроме того, корректировка параметра QuadrocrioPersis также имеет огромную проблему для разработчиков.
«Разработка и реализация терминов» сокращается от прошлого и настоящего срока службы квадроклатерального самолета. Объясняя принцип полета, композицию системы и протокол связи беспилотников, базовые знания о входе беспилотников были введены для начинающих.Начиная с фактической разработки и применения, аппаратной структуры, общего оборудования и производительности и использования самоопределенного четырехугольника -самолета, проектирование программной системы независимой разработки, а также разработку и практику программ управления полетом.Кроме того, «проектирование и реализация самолетов четвертого ротора» также показывает процесс сборки самолета Quadrodrodorreaea, обеспечивая практическую отладку для достижения плавного полета беспилотников, и перечислял ряд практических случаев.
«Проектирование и реализация самолетов четвертого ротора» стремится помочь читателям встретиться, настраивать четырехмоторный самолет из независимого, написания процедур, а также анализ данных и настройки параметров PID на платформе домохозяйственной отладки. Проблема и решение до самолета *Наконец может летать плавно.
Оглавление
Глава 1 Обзор и состояние разработки парка туристического ротора
1.1 Воздушная робототехника
1.2 Статус исследования четырех самолетов ротора дома и за рубежом
1.2.1 Статус -кво иностранных исследований за рубежом
1.2.2 Статусное статус исследований.
1.3 Ключ технологии ротора самолета
1.3.1 Оптимизация общего дизайна
1.3.2 Система энергии энергии
1.3.3 Установите математическую модель
1.3.4 Управление полетом
1.3.5 позиционирование, навигация и общение
Глава 2 Принципы полета полета
2.1 Основной принцип
2.2
2.2.1 Установление системы координат
2.2.2 Решение жеста
2.3 Алгоритм контроля баланса
2.3.1 Принцип корректировки PID квадримального самолета
2.3.2 Параметр PID квадробического самолета установлен (моделирование MATLAB определяется моделированием MATLAB
Теоретический параметр)
2.4 Алгоритм фильтра
2.4.1 Алгоритм фильтра кармана
2.4.2 Алгоритм дополнительной фильтрации
Глава 3 Четыре авиакомпании Rotor Common Communication Соглашение
3.1 Протокол общего интерфейса связи
3.1.1SPI
3.1.2I2C
3.1.3USART
3.2 Общий протокол связи RC (радиоконтроллер)
3.2.1PPM
3.2.2PWM
ГЛАВА 4 ПРИМЕНЕНИЯ ОГРАНИЧЕНИЯ
4.1 Общая структура терминала общая структура
4.1.1 Основная плата управления
4.1.2 Периферийный датчик
4.1.3 Введение пульта дистанционного управления
4.2 Структура кадра и выбор двигателей
4.2.1 Рейнджерс Структура и Установка оборудования
4.2.2 Выбор двигателя и весла
Глава 5 Проектирование программного обеспечения Sours of Rotor Aircraft
5.1 Введение в инструменты разработки
5.1.1CCS
5.1.2IAR
5.1.3Keil
5.2 Программное обеспечение системы управления платой управления полетом общее проектирование общего дизайна
5.2.1 Общая структура
5.2.2 Инициализация
5.2.3 прерывание лечения
5.2.4 Важный список переменных в программе управления полетом
5.3 Реализация программного обеспечения для конкретной функции
5.3.1 Фиксированный высокий рейс
5.3.2 Фиксированная точка суспензии и контроля смещения
5.3.3 Конструкция передачи данных
5.3.4 Проектирование системы управления
5.4 Дизайн программного обеспечения на наземной станции
5.4.1 Конструкция работы интерфейса композиции и графики системы наземной станции
5.4.2 Протокол связи с четырьмя самолетами ротора
5.4.3 Условие сигнала дистанционного управления
5.5 дизайн программного обеспечения верхней машины
5.5.1 Программная функция
5.5.2 Реализация программного обеспечения
ГЛАВА 6 ВОПРОС ОГРОМНЫ
6.1 Технология производства и отладки платы по управлению платы по управлению полетом
6.2 Сборка четырехмоторного самолета
6.2.1. Стадии сборки самолета
6.2.2 Первый процесс отладки недавно собранного четырехлетного самолета
6.3 Общие проблемы и решения отладки
6.3.1 Опыт корректировки параметров
6.3.2 Уменьшите механическую вибрацию для повышения стабильности полета
Глава 7 Случай успеха
7.1 Конкурсная работа 1—— 2015 (Cuisa Cup).
7.1.1 Тематические требования
7.1.2 Системное решение
7.1.3 План реализации
7.1.4 Программная и аппаратная схема
7.1.5 Тест
7.2 Конкурс работает 2—— 2016 (TI CUP) Шанхайский студенческий конкурс Electronic Design
7.2.1 Тематические требования
7.2.2 Системное решение
7.2.3 План реализации
7.2.4 Схема оборудования и программы
7.2.5 Тест
7.3—— Целевой отслеживание квадратного самолета
7.3.1 Обзор темы
7.3.2 Проектирование аппаратной системы
7.3.3 Проектирование программной системы управления полетом.
7.3.4 Проектирование программной системы системной платы
7.3.5 Сводка и перспективы
7.4 Работа по выпускному дизайну 2—— окна на основе Kinect и жесты управляют четырехугольными самолетами
7.4.1 Обзор темы
7.4.2 Обзор аппаратной системы
7.4.3
7.4.4 Планирование и контроль пути
7.4.5 Сводка и перспективы
Рекомендации
Глава 3Общие протоколы связи для самолета Quadrotor
3.1 Протокол интерфейса общего коммуникации 3.1.1spi1.
Система шины последовательного периферического интерфейса (SPI) представляет собой синхронную последовательную периферическую интерфейс, который был впервые определен Motorola на своих процессорах серии MC68HCXX.Интерфейс SPI в основном используется между EEPROM, Flash, часами в реальном времени, AD-преобразователем, а также между цифровыми процессорами сигнала и цифровыми декодерами сигнала, что позволяет MCU общаться и обмениваться данными в последовательном режиме с различными периферийными устройствами [9].Система SPI может быть непосредственно подключена к различным стандартным периферийным устройствам, производимым различными производителями, как правило, используя 4 линии.① Serial Clock Line Sclk.Его основная функция - передавать сигналы тактовых сигналов на подчиненное устройство и управление временем и скоростью обмена данными.②master вход/подчиненный выходной линию данных Miso.Также известный как канал RX, он в основном используется в качестве входа в данные для устройств SPI для получения данных.③master Вывод/Слава входных данных Line MOSI.Также известный как канал TX, он в основном используется в качестве выхода данных для устройств SPI для отправки данных.④ Раб включает сигнал NSS -сигнала (некоторые ICS будут помечены CS, что означает сигнал выбора чипа).Используется для выбора подчиненных устройств для главных устройств, чтобы получить выбранные подчиненные устройства с помощью основных устройств.Чип интерфейса SPI имеет линию сигнала прерывания INT или Int*, а некоторые чипы интерфейса SPI не имеют вывода хоста/линии входных данных подчиненных данных MOSI.Следовательно, системная шина SPI требует только от 3 до 5 линий передачи данных и линий управления для подключения к различным устройствам ввода/вывода с помощью SPI.Шина SPI может образовывать различные простые или сложные системы под управлением программного обеспечения.Например, MASTER MCU и несколько рабовВ большинстве случаев в качестве хоста используется MCU для управления передачей данных одним или нескольким подчиненным периферийным устройствам, а раб может передавать и получать сигналы только тогда, когда сигнал SCLK хоста имеет скачок часов.Рисунок 3.1.1 представляет собой простое описание связи между устройствами SPI, в котором компоненты и их значения следующие.
Рисунок 3.1.1spi Структура связи устройства
① SSPBUF (синхронный буфер последовательного порта), как правило, относится к внутреннему буферу в устройстве SPI.② SSPSR (Синхронный регистр последовательных портов), как правило, относится к регистрации SHIFT (регистр сдвига) в устройствах SPI.③ Контроллер относится к регистрам управления в устройствах SPI.Типичная структура состава SPI показана на рисунке 3.1.2.
Рисунок 3.1.2spi Структура шины (1 мастер, 3 независимых рабов)
2. SPI -интерфейс SPI SPI - это структура кольцевой шины с простым временем.Восходящее преимущество отправляет данные, а падение получает данные.Формат передачи данных высокий (MSB) спереди и низкий (LSB) сзади.Когда появится растущее преимущество, уровень самого высокого бита на SDO будет отправлен в регистр подчиненного устройства;Полный цикл передачи составляет 16 бит, то есть два байта, потому что сначала хост должен отправить команду, а затем раб готовит данные в соответствии с командой хоста, и хост считывает данные обратно в следующем 8-битном тактовом цикле.
Рисунок 3.1.3spi Timing автобуса
Чтобы обмениваться данными с периферийными устройствами, модуль SPI может быть настроен в соответствии с периферическими рабочими требованиями, а полярность такты и фаза ее выходной полярности синхронизации часовых синхронизации (CPOL) не оказывают существенного влияния на протокол передачи.Если CPOL = 0, состояние холостого хода серийного синхронизационного часа является низким;Фаза часов (CPHA) может быть настроена для выбора одного из двух различных протоколов передачи для передачи данных.Если CPHA = 0, данные отображаются на первом крае прыжков (подъем или падение) часа последовательной синхронизации;Основной модуль SPI и периферические часы, общающиеся с ним, должны быть последовательными.Следовательно, в соответствии с настройками CPOL и CPHA, SPI может быть разделен на 4 режима, как показано в таблице 3.1.1.
Таблица 3.1.1spi 4 режима
Режим SPI Часовой полярность (CPOL) Фаза такта (CPHA) 000101210311
Другой часто используемый режим заключается в следующем“ (0, 1)” это означает cpol = 0 и cpha = 1.Ниже приведена процедура реализации последовательной связи SPI с использованием программного обеспечения.
int main(void)
{
Sysctlclockset (sysctl_sysdiv_2_5 | sysctl_use_pll | sysctl_osc_main | sysctl_xtal_10mhz);
Sysctlperipheralenable (sysctl_periph_ssi1);
Sysctlperipheralenable (sysctl_periph_gpiof);
SysCtlGPIOAHBEnable(GPIO_PORTF_BASE); 
GPIOPinConfigure(GPIO_PF2_SSI1CLK);
GPIOPinConfigure(GPIO_PF3_SSI1FSS);
GPIOPinConfigure(GPIO_PF1_SSI1TX);
Gpiopintypessi (gpio_portf_base, gpio_pin_1 | gpio_pin_3 | gpio_pin_2);
// ssi1_base/тактовая частота/протокол тактовой частоты, Moto представляет протокол SPI/Рабочий режим: режим хоста/битовая скорость 4m/count crame bit count 16
Ssiconfigsetexpclk (ssi1_base, sysctlclockget (), ssi_frf_moto_mode_1, ssi_mode_master, 16000000, 16);
SSIEnable(SSI1_BASE);
while(1){
SSIDataPut(SSI1_BASE, 0x2468);
}
}
Приведенная выше программа может включать в себя отправку сообщений через интерфейс SPI перед отправкой сообщений с использованием SPI, функция SPI должна быть настроена в первую очередь.
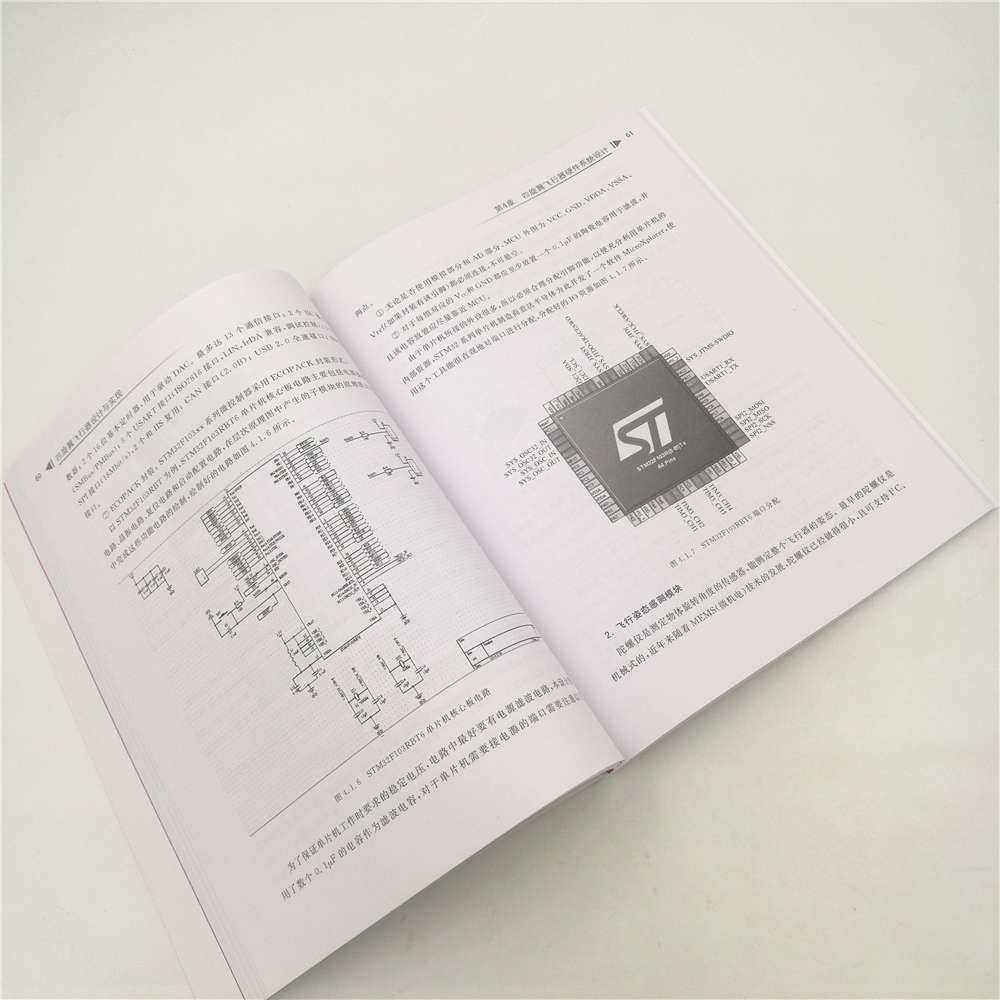
Рисунок 3.1.4TM4C CHIP Configuration Diagram
3.1.2i2c1.
I2C (Interintegrated Curity)-это высокопроизводительная межметражная серийная трансмиссионная шина, запущенная Philips.Основная структура его шины показана на рисунке 3.1.5.
Рисунок 3.1.5 Основная структура шины I2C
Когда шина I2C передает данные, требуются только две линии сигнала, одна представляет собой двунаправленную линию передачи данных SDA, а другая - SCL.Все устройства, подключенные к шине I2C, имеют последовательные данные, подключенные к линии SDA шины, а часовая линия каждого устройства подключена к линии SCL шины.Автобус I2C-это автобус с несколькими хостами, то есть автобус I2C может иметь один или несколько хостов, а эксплуатационная работа управляется хостом.Упомянутый здесь хост относится к устройству, которое запускает передачу данных (сигнал инициации), отправляет такточный сигнал и отправляет сигнал завершения в конце передачи.Обычно хост представляет собой различные микроконтроллеры или другие микропроцессоры.Устройство, посещаемое хостом, - это раб, который может быть различными микроконтроллерами или другими микропроцессорами, или другими устройствами, такими как память, светодиодные или ЖК -драйверы, конвертеры A/D или D/A, устройства календаря тактового календаря и т. Д.Автобус I2C представляет собой двунаправленную синхронную последовательную шину, поэтому интерфейс шины I2C представляет собой двунаправленную схему передачи.Выход интерфейса шины представляет собой конструкцию с открытым дрином, поэтому на шине должен быть резистор подтягивания.Для связи каждое устройство, подключенное к шине I2C, имеет уникальный адрес.Передача данных между хостом и рабом может быть отправлена хостом на другие устройства на шине, а хост называется передатчиком.Устройство, которое получает данные с шины, является приемником.В системе с несколькими хостами несколько хостов могут попытаться инициировать данные о передаче шины одновременно.Чтобы избежать путаницы и обеспечить надежную передачу данных, шина может контролироваться только определенным хостом в любое время.Если два или более хостов пытаются занять автобус, однажды один хост отправит его“1”, в то время как другой или более поставки“0”, дай“1” хозяин выходит из конкурса.Во время процесса конкуренции такточный сигнал - это асинхронная линия тактовой сигнала, генерируемая каждым хостом.&LDQUO” результат.Часы на автобусе I2C всегда соответствуют хосту.Когда данные передаются, каждый хост генерирует свои собственные часы, а часы, генерируемые хостом, меняются только на низком уровне ширины медленной подчинения или не сбои в конкуренции.Когда автобус простаивает, оба автобуса высоки.Выходная стадия устройства, подключенного к шине, должна быть сливкой или открытой схемой коллектора.2. Передача данных шины I2C 1) Эффективность данных на шине находится на шине I2C, а передача каждого бита данных соответствует тактовому импульсу, логике“0”“1&Уровень сигнала RDQUO;Когда шина I2C передает данные, во время тактового сигнала высока, линия данных должна поддерживать стабильное состояние логического уровня, а высокий уровень
Эта книга врезается в историю и статус -кво четырехлетного самолета и вводит базовые знания о входе беспилотников для начинающих, объясняя принцип полета, композицию системы и протокол связи беспилотников; начиная с фактической разработки и применения аппаратной структуры, Обычно используется оборудование и производительность, а также использование самостоятельно разработанного самолета Quirkin, проектирования программной системы независимой разработки, а также разработки и практики программ управления полетом; кроме Реализация реализации Практический опыт отладки беспилотников, устойчивых, перечисляет ряд практических случаев применения.Эта книга стремится помочь читателям посещать встречу, настраивать четырехмоторный самолет, записывать программу, анализировать данные и настраивать параметры PID на платформе отладки домашнего приготовления. Самолет*может летать гладко.Эта книга подходит для начала начинающих, которые заинтересованы в самолетах Quirki. Она также может быть использована в качестве справочника для студентов колледжа, участвующих в конкурсах дизайна Drone Drone в области беспилотных летательных аппаратов.
 ......
......