Динамическая оценка неисправности системы и расширенное управление системой управления полетом Оценка сбоя. Оценка сбоя динамической системы.

Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара








наименование товара: | Динамическая оценка неисправности системы и расширенный контроль |
Название книги по маркетингу: | Новый метод введения и расширенного управления квантовым управлением |
Автор: | Авторы сценария Чэнь Фуян и Цзян Бинь |
Цены: | 98.00 |
ISBN: | 978-7-122-38165-1 |
Ключевые слова: | Управление полетом; динамическая система; оценка сбоя; диагностика неисправностей |
масса: | 382 грамма |
Издательство: | Химическая промышленность пресса |
формат: | 16 | Фрагментация: | квартира |
Опубликованная дата: | 2022 февраль | Версия: | 1 |
Номер страницы: | 186 | Индийский: | 1 |

Эта книга приводит к тому, что исследование автора приводит к контролю полета в последние годы. Порядок анализа метода разработки метода анализа метода анализа-проверка оценки неисправности системы управления полетом и расширенного контроля установлена в соответствии с моделью сбоя. Земля Динамическая система неисправная оценка и расширенное управление динамической системой. Содержание книги от мелкого до глубокого, шага -шага и сильных инноваций. Он может использоваться для исследования и применения соответствующих областей, таких как диагностика разломов и устойчивость к разломам. контроль. Сущность

Эта книга собирает новые методы и расширенное управление динамическим сбоем системы и продвижением управления. Принимая систему управления полетом в качестве объекта исследования, анализируя влияние неисправностей, помех и неопределенности системы на динамическую систему, она дает оценку неисправности и расширенное управление Алгоритм, который улучшает улучшение, что улучшает улучшение, что улучшает улучшение. Самоавтоматическая способность динамической системы к разломам, особенно композитным разломам, основное содержание включает в себя: применение передовых элементов управления, таких как интеллектуальное управление и квантовое управление в Поле диагностики неисправностей и контроль разлома -Внешнее нечеткое нечеткое модель с двумя типами, адаптивная итеративная оценка сбоев, контрольная технология на основе слайдов и динамическая технология поверхности и другие технологии; вставка системы осанки и чрезмерная система с сложными Системы сбоя и разлома -ТОЛЕРАННЫЕ ПРОИЗВОДИТЕЛЬНЫЕ ПРОИЗВОДСТВО ИСПРАВЛЕНИЯ Управления;
Эта книга продвинута, с новыми точками зрения и сильными инновациями. Она доступна для изучения и применения из соответствующих областей, таких как диагноз неисправностей и контроль от разлома.

Чэнь Мюянг, школа автоматизации, Университет аэронавтики и астронавтики Нанкинского университета, профессор, докторант, уже давно занимался адаптивным контролем, диагностикой неисправностей и контролем устойчивости к разломам, контролю над самоуничтожением, контролем полетов, Интернету вещей и технологии управления, Квантовая информация и теория контроля, научные исследования в области диагностики разломов и контроля управления дорожным движением в системе управления информацией с высокой скоростью.В настоящее время он является членом Профессионального комитета по автоматическому контролю Китайской ассоциации военных и рабочих, члена Профессионального комитета автоматического контроля аэрокосмического общества провинции Цзянсу и членом Специального комитета теории и технологий квантового контроля и технологий Полем

Глава 1. Введение/001
1.1 Предыстория исследований в области оценки неисправностей и расширенного контроля 002
1.2 Текущий статус исследований в стране и за рубежом 003
1.3 Последние результаты исследования 006
Глава 2 Адаптивная оценка неисправностей и отказоустойчивое управление на основе нечеткого моделирования типа II/009
2.1 Введение 010
2.2 Высоко -альен -скорость пролета.
2.3 Улучшенная конструкция алгоритма адаптивной оценки неисправностей 013
2.4 Конструкция контроллера компенсации неисправностей 017
2.5 Проверка моделирования и анализ результатов 019
Глава 3 Тип вагагенетической модели с внешним нарушением многоэтапной адаптивной итерационной оценки недостаточности/027
3.1 Введение 028
3.2 Интервал нечеткой модели типа 2 с сбоем и возмущением смещения привода 028
3.3 Разработка многоэтапного метода оценки неисправностей 030
3.4 Проверка моделирования и анализ результатов 033
Глава 4 Оценка неисправности закрылков и управление самовосстановлением на основе управления скользящим режимом и технологии динамической поверхности/041
4.1 Введение 042
4.2 Модель модельной системы с сбоем гаула с разломом лопаток 042
4.3 Самостоятельный дизайн управления высокоультразвуковой системой положений жеста 044 044
4.3.1 Конструкция виртуального входа управления со скользящим режимом несингулярного терминала внешнего контура 044
4.3.2 Конструкция регулятора самовосстановления динамической поверхности внутреннего кольца 046
4.4 Распределение управления RCS на основе вторичного распределения 049
4.5 Эксперимент по моделированию и анализ результатов 050
Глава 5 Отказоустойчивое управление на основе нечеткой оценки отказов и оптимального распределения с кукушкой/057
5.1 Введение 058
5.2 Улучшенная стратегия управления системой почты 058
5.3 Разработка адаптивного нечеткого оценщика типа II 059
5.4 Конструкция самовосстанавливающегося контроллера внутреннего контура 061
5.5 Назначение управления на основе алгоритма поиска кукушки 062
5.6 Эксперимент по моделированию и анализ результатов 064
Глава 6 Круизная система с параметрами неопределенной и адаптивной адаптивной ошибки управления сбоем привода/069
6.1 Введение 070
6.2 Модель вертикальной системы с сбоем привода 070
6.3 Обнаружение и оценка неисправности привода 072
6.3.1 Создание модели линеаризации обратной связи 072
6.3.2 Разработка метода обнаружения неисправностей 073
6.3.3 Разработка метода адаптивной оценки неисправностей 074
6.4 Адаптивная отказоустойчивая конструкция контроллера 075
6.4.1 Название SMC Design Smech 075
6.4.2T-S нечеткая система Описание 076
6.4.3 Адаптивная конструкция регулятора скользящего режима 077
6.4.4 Адаптивная отказоустойчивая конструкция контроллера 079
6.5 Имитационный анализ 080
Глава 7 Re -Entering Poseida System Diagnose Dailseable и Design Malaysia Controller/087
7.1 Введение 088
7.2 Положение при входе в атмосферу и модель прерывистого отказа 088
7.3 Разработка метода диагностики периодических неисправностей 090
7.4 Конструкция отказоустойчивого контроллера 095
7.5 Анализ моделирования 097
Глава 8 Чрезмерное назначение и отсутствующий дизайн дистрибуции управления приводами и отсутствующий контроль страсти/103
8.1 Введение 104
8.2 Положение при входе в атмосферу и модель отказа привода 105
8.3 Разработка метода одновременной диагностики неисправностей привода 106
8.4 Отказоустойчивая схема назначения управления 110
8.5 Имитационный анализ 114
Глава 9 Многосенсорное самовосстановление неисправностей на основе адаптивного и обратного скользящего режима наблюдателя / 123
9.1 Введение 124
9.2 Вертикальная имитация не -линейная модель с несколькими разломами датчиков 124
9.2.1 Высокая скоростная продольная модель 124
9.2.2 Линеаризация обратной связи ввода-вывода 126
9.2.3 Неисправности мультисенсора 127
9.3 Оценка неисправностей мультисенсоров и разработка контроллера с самовосстановлением 128
9.3.1.
9.3.2 Разработка схемы оценки неисправностей с несколькими датчиками 129
9.3.3 Конструкция нелинейного отказоустойчивого регулятора 135
9.4 Проверка и анализ моделирования 135
Глава 10 Диагностика неисправностей блокировки датчиков и отказоустойчивое управление на основе многомерного обобщенного наблюдателя/143
10.1 Введение 144
10.2 Вертикальная нелинейная модель размытия с разрушением и нарушением блокировки датчика 144
10.3 Конструкция метода диагностики неисправности блокировки датчиков 146
10.3.1 Разработка схемы обнаружения неисправностей 147
10.3.2 Многомерная конструкция наблюдателя для обобщенной нелинейной оценки неисправностей 149
10.4 Надежная отказоустойчивая конструкция контроллера 152
10.5 Проверка и анализ моделирования на основе Matlab/Simulink 154
10.6 Проверка 160 на основе результатов быстрого моделирования прототипа Links-Box
10.6.1 Links-Box Fast Prototrans Введение 160
10.6.2Links-RT-система запуска процесса 161
10.6.3 Результаты процесса моделирования Дисплей 162
Глава 11. Обнаружение неисправностей сегмента повторного входа и управление самовосстановлением на основе технологии косвенного адаптивного скользящего режима/165
11.1 Введение 166
11.2 Модель позаконного отношения с помощью сбоя датчика 166.
11.3 Комплексная схема обнаружения неисправностей и управления самовосстановлением датчика входного сегмента 168
11.3.1 Конструкция наблюдателя нелинейного обнаружения неисправностей 168
11.3.2 Проектирование виртуального отказоустойчивого контроллера адаптивного скользящего режима с внешним контуром 169
11.3.3 Разработка адаптивного контроллера динамической поверхности с внутренним контуром 171
11.4 Проверка и анализ моделирования 174
Ссылки/179

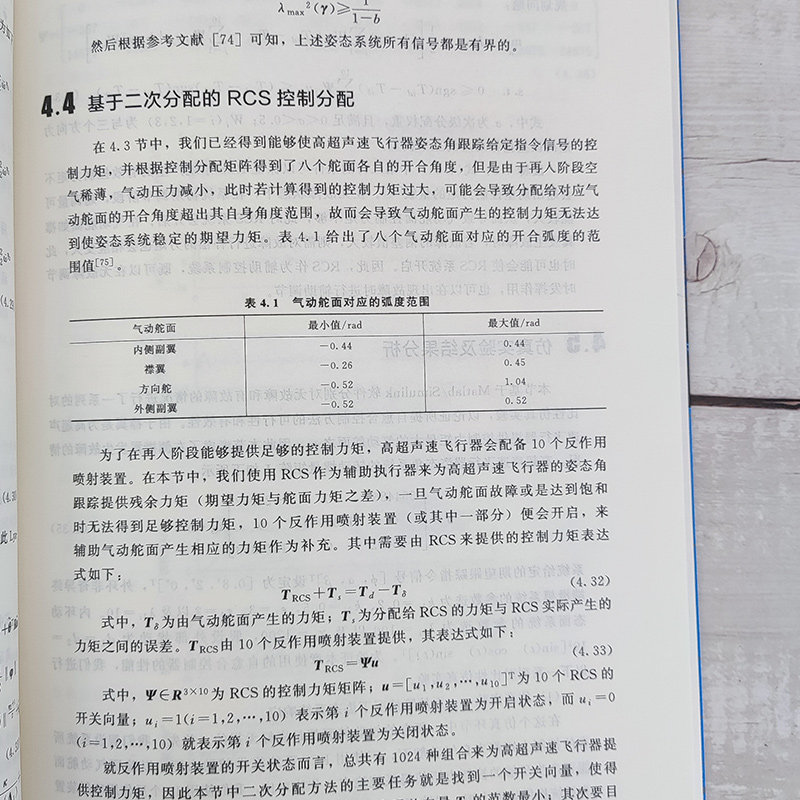
никто
