Способ высшего образования] Второе издание второго издания Chengpeng Height Education Press, второго издания второго издания второго издания второго издания автоматической науки и электротехники



Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара





Обычное высшее образование“Одиннадцатая пять”Национальный учебник по планированию
Автоматический принцип управления
второе издание
Основная информация
Пресс: высшее образование в прессе;
Название серии: обычное высшее образование“Одиннадцатая пять”Национальный учебник по планированию
Бумага: стр. 417
Язык: упрощенный китайский
Кайбен: 16
ISBN: 9787040287028, 7040287021
Шатрикод: 9787040287028
Размер товара: 26 x 20,2 x 3,2 см
Вес товара: 739 г
Бренд: пресса высшего образования
ASIN: B003TNKBN6
Введение
«Принципы автоматического управления (2 -е издание)» - это пересмотренная версия «Принципы автоматического управления», опубликованную Press Height Education Press в 2003 году.Первое издание этого учебника было названо в отличном учебнике с высшим образованием Пекина в 2004 году, а затем был включен в обычное высшее образование“Одиннадцатая пять”Национальные учебники по планированию.Пекинский университет аэронавтики и астронавтики автоматически контролировал принципы Университета аэронавтики и космонавтики, который был лекционным материалом и выиграл титул национального курса бутика в 2006 году.По сравнению с первым изданием, на основе поддержания основного стиля и содержания оригинальных учебников, были скорректированы только некоторые главы и содержание, и некоторые упражнения были добавлены надлежащим образом.
В учебнике основные методы содержания и анализа и исследования теории автоматического управления введены в комплексной и систематической основе, включая создание системных математических моделей, анализ метода временной области, метода корневой траектории и метода частотной области системы, коррекция Дизайн линейной системы; Аналогично диагонализации и базовому знанию стандартных форм, программных приложений MATLAB.Каждая глава имеет соответствующие упражнения, и некоторые упражнения даются в конце учебника.
Этот учебник может использоваться в качестве специализированного учебника, такого как электронная информационная наука, инструменты, электрическая информация и автоматическое управление электронными информационными науками, инструменты, электрическая информация и автоматическое образование. образование.
об авторе
Ченг Пенг, мужчина, родившийся в сентябре 1938 года, окончил факультет математической механики Пекинского университета в 1962 году (шесть лет бакалавриата).Профессор Школы автоматизации науки и электротехники Пекинского университета аэронавтики и астронавтики, докторант в области теории контроля и дисциплины по контролю.Отличные учителя в Пекине пользуются специальными правительственными пособиями.Долгосрочная лекция“Автоматический принцип управления”,“Теория линейной системы”,“Оптимальная теория управления”Подождите курсов.Ведущий Бейханг“Автоматический принцип управления”Национальный бутик -курс строительство.Учебная работа выиграла первый приз Пекинского высшего образования.Существует более десяти книг, включая «Принципы автоматического управления» и «Теория линейной системы».Он выиграл второй приз выдающегося учебника для Министерства авиационной промышленности и Национальной национальной комиссии по образованию.Редактор -«Принципы автоматического контроля» и «теоретическая основа современного контроля» были оценены как учебники из высшего образования Пекин.Основными областями исследований являются теория линейной системы, теория мульти -высокой системы, надежный контроль и контроль самолетов, а также в основном на национальных естественных науках и авиационных научных фондах и других приложениях.Опубликовано более 70 статей в академических конференциях и основных публикациях.
Оглавление
Глава 1 Общая концепция автоматического управления
§1-1 Задача автоматического управления
§1-2 Основной способ начать контроль
§1-3 Требования к производительности системы управления
упражнение
Глава 2 Математическая модель автоматической системы управления
§2-1 Установление дифференциального уравнения системы управления
§2-2-2 нелинейное дифференциальное уравнение линеаризация
§2-3 трансферная функция
§2-4 Динамическая структурная диаграмма
§2-5 Функция импульсного отклика системы
§2-6 Несколько функций передачи типичной системы обратной связи
упражнение
Метод анализа по времени главы III
§3-1 Основная база анализа доменной области
§3-2 Первый, анализ и расчет системы второго порядка
§3-3 Анализ стабильности системы
§3-4 Анализ и расчет устойчивых ошибок
упражнение
Глава 4 Метод корневой трассы
§4-1 Корневая траектория и уравнение траектории корня
§4-2 Основные правила рисования корневой траектории
§4-3 Корневая траектория открытия нуля и полярной точки изменяется
§4-4 траектория корня нулевой степени
§4-5 Взаимосвязь между нолью закрытого цикла, полярным распределением и ответным ответом
§4-6 Анализ траектории корневой траектории отклика системного прыжка
упражнение
Глава 5 Метод частотной области
§5-1 от преобразования Фурье до Фурье
§5-2 частотные особенности
§5-3 Частотные характеристики типичных ссылок
§5-4 Частотные характеристики открытия системы
§5-5 Частотное стабильное суждение
§5-6 Взаимосвязь между характеристиками замкнутой частоты и пошаговым откликом системы
§5-7 Взаимосвязь между характеристиками частоты открытия и реакцией на прыжок системы
упражнение
Глава 6 Коррекция системы управления
§6-1 Основы дизайна по коррекции системы
§6-2 Коррекция кандидатов
§6-3 Теоретический метод проектирования соединения коррекции
§6-4 Коррекция обратной связи
§6-5 Составная коррекция
упражнение
Глава VII не -линейный анализ системы
§7-1 Обзор нелинейных проблем
§7-2 Влияние общих нелинейных факторов на характеристики движения системы
§7-3 Фонд фазового выравнивания Фонд
§7-4 Нелинейный анализ фазовых траекторий системы
§7-5 Описание функция
§7-6 Проанализируйте нелинейную систему с помощью метода функции описания
упражнение
Глава 8 Теория системы отбора проб
§8-1 процесс отбора проб и теорема выборки
§8-2 восстановление сигнала и держатель нулевого уровня
§8-3 z трансформация и z антитрансформация
§8-4 Функция передачи импульса
§8-5 Анализ производительности системы образца
§8-6 Цифровая коррекция системы отбора проб
упражнение
Глава 9 Метод анализа статуса.
§9-1 Метод статуса основана
§9-2 управляемость и наблюдение линейной системы
§9-3 Статус обратная связь и наблюдение за статусом
§9-4 пограничный вход, ограниченная стабильность вывода
§9-5 Ли Япанов Второй метод
упражнение
Приложение I преобразование Лапласа
Приложение ⅱ Матрица аналогична диагонализации и расписанию в качестве стандарта
Приложение III программное обеспечение MATLAB и проектирование автоматической системы управления
Некоторые упражнения ответы
Рекомендации
Предисловие
В настоящее время технология автоматического контроля широко используется в промышленности, сельскохозяйственном производстве, транспорте и национальной обороне.Теория направления автоматического анализа системы управления и теории контроля дизайна также развилась, и ее концепции, методы и системы проникли во многие научные области.Классическая теория управления, разработанная в 1940 -х и 1950 -х годах, все еще успешно применяется к анализу и проектированию единых нормальных систем.Пространственный метод штата, разработанный в конце 1950 -х и начале 1960 -х годов, имеет более широкий диапазон применимости.Чтобы удовлетворить потребности студентов в высших учебных заведениях, в соответствии с соответствующими учебными набросами и школьными организациями, основные части классической теории контроля и пространства статуса были выбраны в качестве контента для написания этого учебника.Этот учебник может быть выбран для электронной информационной науки, инструментов, электрической информации и автоматического управления.
Этот учебник последовал за двумя частями классической теории управления и метода пространства статуса.“Традиционная модель”Предстоящая классическая теория и современная теория контроля написаны отдельно, в основном учитывая, что традиционная модель оказалась эффективной и может быть продолжена.Кроме того, математические основы этих двух аспектов различны, и идеи решения проблем различны.Чтобы восполнить отсутствие традиционных моделей письма, рекомендуется сознательно связаться с классической теорией управления при разговоре о современной теории управления.
Этот учебник является пересмотром «принципов автоматического контроля», опубликованных Press Height Education Press в 2003 году.С момента публикации первого издания этого учебника его приветствовали многие студенты и технические и технические персоналы, и он выбран для многих колледжей и университетов.В 2004 году он был оценен как бутик учебник для высшего образования в Пекине, а затем был включен в обычное высшее образование“Одиннадцатая пять”Национальные учебники по планированию.Пекинский университет аэронавтики и астронавтики автоматически контролировал принципы автоматического контроля Университета аэронавтики и астронавтики, который был удостоен звания национальных курсов высокого качества в 2006 году.По сравнению с первым изданием, на основе поддержания основного стиля и содержания оригинальных учебников, были скорректированы только некоторые главы и содержание, и некоторые упражнения были добавлены надлежащим образом.
Этот учебник организует содержимое 9 глав.Первая глава представляет общую концепцию автоматического управления. Большим количеством примеров.Затем приведите три примера, чтобы ввести такие концепции, как управление открытием, управление с закрытым и композитным управлением.Основное внимание уделяется принципу системы обратной связи и объяснении компонентов.Динамические процессы и требования к производительности системы вводят только предварительные концепции.
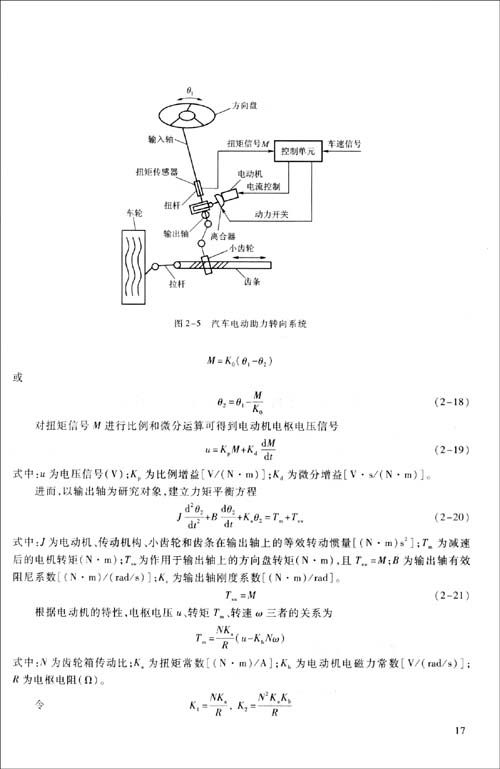
Вторая глава представляет математическую модель автоматической системы управления, включая дифференциальные уравнения, функции передачи и функции импульсного отклика.Он подчеркивает системные характеристики линейного нормально дифференциального деления уравнений: принцип суперпозиции, вневременности и физической реализации; Формула Мессона и динамическая структурная диаграмма объединены в нее.Чтобы соответствовать современным технологиям, в этом ревизии пример, соответствующий временам, таким как система помощи автомобиля.
Абстрактный
Иллюстрация:
Автоматический контроль является важным техническим средством, какая инженерная проблема может быть решена?Какие технические задачи вы можете выполнить?
Любое техническое оборудование, машины и производственные процессы должны работать в соответствии с запланированными требованиями.Например, для того, чтобы сделать мощность генератора нормально, он должен сохранить постоянную константу выходного напряжения и стараться не затронуть изменение нагрузки и колебания скорости исходной скорости двигателя. Необходимо убедиться, что рама ножа должен точно следовать инструкциям;Среди них генераторы, машины и духовка являются механизмом и оборудованием работы; Температура печи - это физика физической физики для физической физики.
Как правило, в технологии автоматического управления машины и оборудование этих задач называются контролируемым объектом, а физические параметры рабочего состояния машины и оборудования называются обвиняемыми, а требования к требованиям этих физических параметров являются называется данным значением или значением надежды (или справочного ввода).Задача управления может быть суммирована как: сумма контролируемого объекта равна заданному значению.
Задача автоматического управления состоит в том, что никто не участвует непосредственно, используя устройство управления для манипулирования контролируемым объектом, так что регулярный объем равен данному значению.