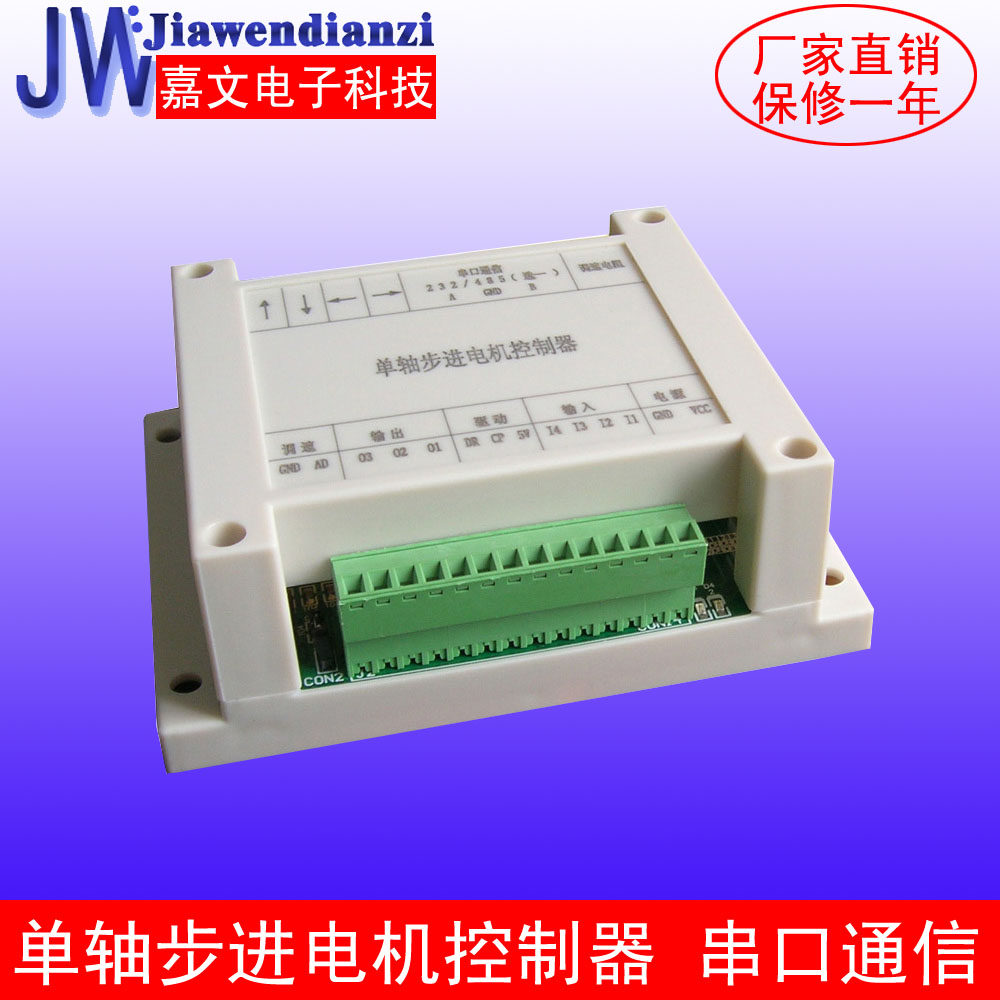
Контроллер шага-двигателя/импульс произошел/сервоприводный/потенциометр (одиночная или двойная ось) последовательный порт RS-232





Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара
- Односторонняя версия индивидуального протокола
- Двойная версия индивидуального протокола
- Одиночная версия Modbus
- Двойное издание Modbus



| Цвет: | Односторонняя версия индивидуального протокола, Двойная версия индивидуального протокола, Одиночная версия Modbus, Двойное издание Modbus |


[震撼上市!超高性价比!可适合往返运动,定长控制,速度控制。]
[2017年9月推出本控制器:][单轴MODBUS-RTU协议版本和][双][轴自定义串口协议版本!外形与原来单轴自定义串口协议版本类似,内部软件不同!]
[产品名称说明:单轴自定义协议RS232控制器,型号缩写为:DZZC-]RS232[;双][轴自定义协议]RS232
[控制器,型号缩写为:SZZC-]RS232[;单轴MODBUS-RTU协议]RS232[控制器,缩写为:DZMC-]RS232
[本控制器的说明书、接线图、上位机软件下载资料链接:]
[http://bbs.hymcu.com/viewthread.php?tid=39294]&extra=page%3D1
[产品尺寸图:]

[功能模式有(以自定义协议单轴控制版本为例说明,另2款请下载说明书查看其功能):]
[0:自编程模式(即串口通信控制)]
[1:自动往返模式]
[2:单次往返模式]
[3:单次触发模式]
[4:点动模式]
[此控制器为工控应用RS-232(串口)。]
[温馨提示:此控制器有485接口,淘宝链接]
[与本小控制器配套的串口线链接(母-母交叉串口线):]
[若计算机没有串口,需要的USB-232线,链接如下:]
[一、 资源说明]
[ 1 、 一路步进电机控制输出(必要时可以扩展 2 路 ) 。]
[2 、 3 路 OC 输出 , 500mA , 下称 O1 、 O2 、 O3] [( 可以外接5V继电器、LED 指示 灯等)。输出5V低电平。]
[3 、 4 路光耦隔离输入,低有效 ( 24V 地有效 ) ,下称 I1 、 I2 、 I3 、 I4 (可以外接][机械开关、][接近开关( NPN常开型) 、光电开关( NPN常开 )等 。 ]
[4、] [一路 AD 采集 , 可通过接入 1 个 10K 可调电阻外部调节电压 , 范围 0-3V 。可用来调节固定模式中的运行速度。 ]
[5、] [一路 RS232 串口 (与上位机进行通信 ) 。 ]
[6、][上下左右四方向按键,两路 LED 状态指示灯。]
7[、 存储 IC (EEPROM) ,断电可存储数据。]
[二、 功能 简述]
[1、5种工作模式:] [可编程模式(串口通信)] [和][4 种固定工作模式。]
[2、可编程模式:即通过上位机编程设定参数(方向、距离、速度)。]
[3 、4种固化的工作模式,可以满足更多的应用需求。]
[4、步进脉冲频率可调节, AD 采集到 0-3V 电压信号对应频率 0-50K HZ,默认频率 1KHZ 。][此功能只能在4种固化的工作模式中有效,而不能调节自编程模式中的速度。]
[三、 工作模式设定及模式说明]
[1、 2 个 LED 显示模式:]
Mode 1 2 3 4
LED1 ON ON OFF OFF
LED2 ON OFF ON OFF
[2、可][编程模式][:串口通信功能(协议已开放)]
[可编程模式(串口通信控制);通过上位机串口/485接口控制步进电机运行和停止,以及设定运行的参数后,控制器就可以脱离计算机工作,即脱机工作。]
[脱机工作说明:]
[ 该模式下触发]I1[,电机按照在上位机上设定的距离、方向、速度运行。如果运行方向设定为正,并且起点不在]I3[限位点时,则触发]I1[到达]1[点后触发]I3[正转限位点,电机立即停止。]
[若方向为正,并且起点在]I3[限位点时,则触发]I1[电机不运行。如果运行方向设定为反,并且起点不在]I4[限位点时,则触发]I1[到达]0[点后触发]I4[反转限位点,电机立即停止。若方向为反,并且起点在]I4[限位点时,则触发]I1[电机不运行。]
[当触发]I2[信号,电机以上位机设定速度反转,直到碰到]I4([反转限位点])[后停止运行。]
[3、4种固化模式设定方式:(通过板载4个按键选择进入不同模式)]
[在这四种模式当中,速度可以根据电位器进行调节。]
[Mode1 :自动往返模式 ] [按][←][键]([左键])[进入]
[ I1---------- 启动控制触发端]
[ I2---------- 停止控制触发端]
[ I3---------- 正转限位触发端]
[ I4---------- 反转限位触发端]
[ 该模式上电后 , 触发 I1 电机正转 ( 同时 O1 、 O2 、 O3 输出有效 ) , 从 0 点出发 , 到达 1 点后触发 I3 (同时 O1 、 O2 、 O3 输出无效 ) ,电机反转向 0 点运动。当电机到达 0 点后触发 I4(同时 O1 、 O2 、 O3 输出有效) 电机正转,向 1 点运动。如此往返运动。直到触发 I2 (同时 O1 、 O2 、 O3 输出无效) 停止按键后电机停止,][按][→][键]([右键])[回到主界面。]
[Mode2 :单次往返模式 ] [按][→][键]([右][键])[进入]
[ I1---------- 启动控制触发端]
[ I2---------- 停止控制触发端]
[ I3---------- 正转限位触发端]
[ I4---------- 反转限位触发端]
[ 该模式上电后,触发 I1 电机正转 (同时 O1 、 O2 、 O3 输出有效 ) ,从 0 点出发,到达 1点后触发 I3 ,电机反转,向 0 点运动。当电机到达 0 点后,触发 I4 电机停止 (同时 O1 、O2 、 O3 输出无效 ) ,完成一次运动过程。在电机运行中,如果触发 I2 (同时 O1 、 O2 、 O 3输出无效) , 电机立即停止,当再次启动电机时,电机运行方向与停止前一致],[按←键]([左][键])[回到主界面。]
[Mode3 :单次触发模式 ] [按][↓][键]([下键])[进入]
[ I1---------- 启动控制触发端]
[ I2---------- 停止控制触发端]
[ I3---------- 正转限位触发端]
[ I4---------- 反转限位触发端]
[ 该模式上电后,触发 I1 电机正转,当触发 I2 或者 I3 或者 I4 后停止。如果再次 触发 I 1]
[ 电机启动 运行方向由上一次停止触发 控制决定。如果上一次停止是由 I3 触发停止 ,则这次]
[ 运行 方向为反 ,如果上一次停止是由 I4 触发停止 ,则这次运行 方向为正 。如果上一次停止]
[ 是由 I2 触发停止 则这次运行 方向和上次运行方向一致],[按→][键]([右键])[回到主界面。]
Mode4[:点动控制模式 ] [按][↑][键]([上键])[进入]
I1----------[正转控制触发端]
I2----------[反转控制触发端]
I3----------[正转限位触发端]
I4----------[反转限位触发端]
[模式上电后,触发]I1[或者←键]([左键时])[电机正转,当触发]I3[后停止,]I3[触发未解除之前再次触发]I1[不运行。触发]I2[电机反转,当触发]I4[后停止,]I4[触发未解除之前再次触发]I2[不运行。][按↓][键]([下键])[回到主界面。]
----------
