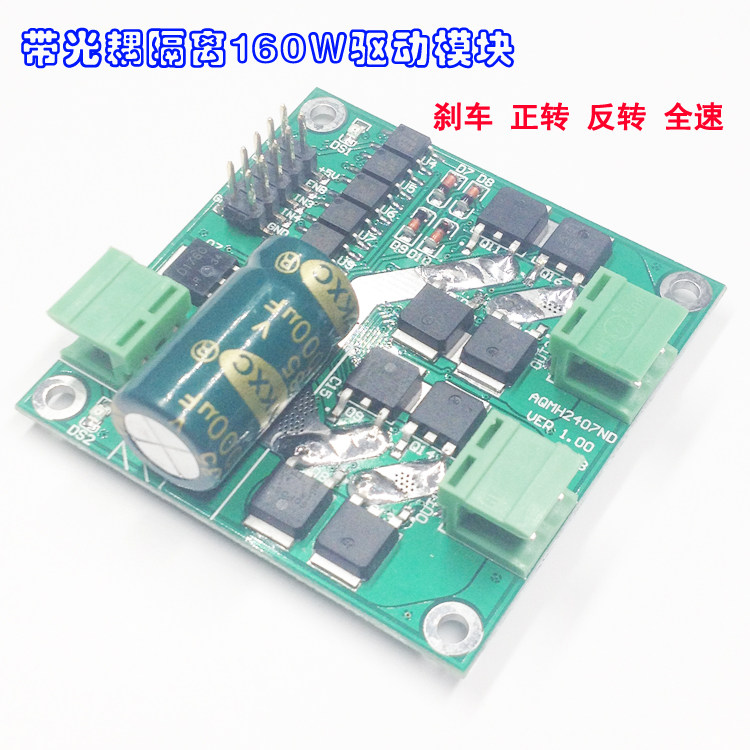
12/24V 7A 160 Вт Двойной дорогой модуль двигателя DC/плата H Bridge L298 Логика



Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товара



Автоматическая передняя часть управления.
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-16779754051.24a1d7v68nd&id=568716857286
30A DC Drive (Board) Ссылка на покупку:
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-16779754051.11.b2d91dwyvds8&id=56234907417
60A DC Drive (Правление) Ссылка на покупку:
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-16779754051.9.373f1dsjfx9t&id=5625611416844
100A DC Drive (Board) Ссылка на покупку:
https://item.taobao.com/item.htm?spm=a1z10.3-c.w4002-16779754051.45aa1d0y8fn&id=562558601597
Нажмите больше модуля DC Drive, чтобы нажать на ссылку на следующую ссылку:
https://52electrect.taobao.com/search.htm?q=%D6%B1%C1%C7%C7%B6%F&searcy_type=item_from=newheader&ssid=s5-e&search = y & spm = a1z10.1.1996643285.dese = И кодирование = utf8
Это продукт -Уровень, используемый для колесниц, роботов, лабораторий и энтузиастов DIY, а стоимость повышается; Если вы не ссылаетесь на «Руководство пользователя», операция спецификации повреждена, не выходите на пенсию или ремонтируйте, пожалуйста, прочитайте Руководство пользователя тщательно.
Голые моторные приводы (модули) без оболочек -это специальные продукты, продвигаемые по ценам на расходы и не договариваются.Пожалуйста, обратитесь к руководству по продукту внимательно.
Функции
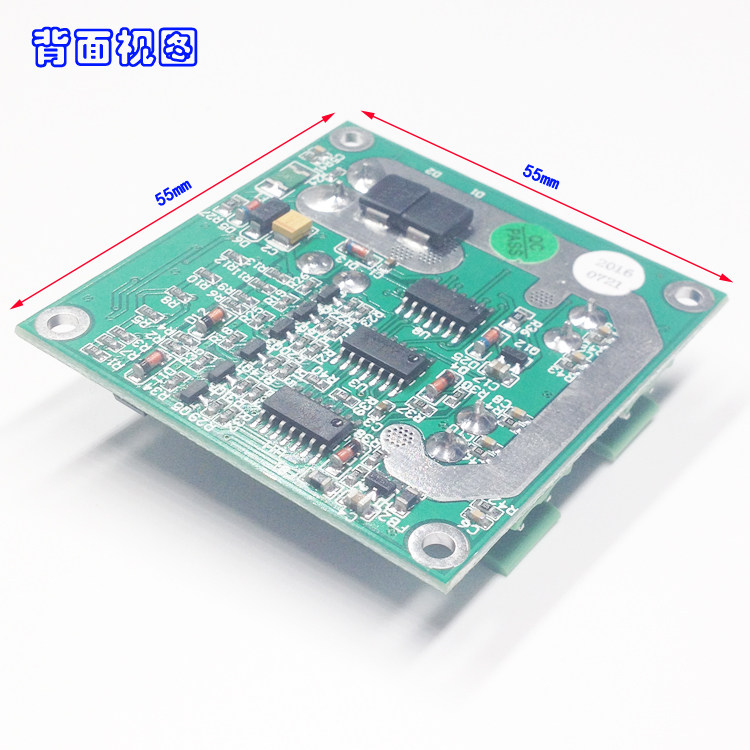
| ◆ Очень маленький размер, всего 5,5 см.×5.5cm |
| ◆ Поддерживающее напряжение 7 В ~ 24 В, обязанная защита напряжения |
| ◆ Двойной интерфейс двигателя, каждый выходной ток с номиналом 7A |
| ◆ Подобно логике управления L298, каждая дорога поддерживает контроль третьего линии, включение, прямое обратное и торможение |
| ◆ Включить сигнал может быть подключен к ШИМ, положительные и обратные контрольные сигналы могут быть подключены последовательно, |
| ◆ Управляющий сигнал использует драйвер тока орошения для поддержки подавляющего большинства однополушных микрокомпьютеров прямого привода |
| ◆ Используйте OptoCoupler, чтобы выделить все контрольные сигналы |
| ◆ Существует статическая протекающая цепь |
Принципы
Этот модуль моста использует дверные цепи и объединяет комбинации с трубами MOS, чтобы реализовать контроль переднего управления торможением и скоростью двигателяСущностьСуществуют как большие выходные токи, так и гибкая логика управляющего сигнала, похожая на L298.
| Метод помех для лечения:Управляющий сигнал оптокуплер выделение, подавление напряжения питания питания. |
| Логика управления сигналом:Используйте схему двери, чтобы реализовать логику управления, аналогичную L298. |
| H Бридж метод реализации:Используйте P и N, чтобы дополнить трубки MOS для достижения моста H. |
| Защита от мощности:Используйте чип сброса для достижения под защитой давления. |
Технические параметры
| проект | параметр |
Диапазон входного напряжения | DC 6,5 В ~ 27 В |
| Номинальное входное напряжение | DC 12V/24V |
| Количество выходных каналов | 2 -я дорога |
| Каждый рейтинг выходной ток | 7A |
| Пик выходного тока на дорогу | 50A |
| Каждое номинальное выходное мощность | 84W (12 В питания) |
| Напряжение контрольного сигнала | 3 ~ 6,5 В. |
| Каждый ток управляющего сигнала | 3 ~ 11 мА |
| Минимальная эффективная ширина импульса ШИМ | 5us |
| Рабочая Температура | -25 ℃ ~ 80 ℃ |
| Размеры | 5.5cm×5.5cm×2.0cm |
ПодходящийМоторные параметры:
Номинальное напряжение24VДвигатель, соответствующая идентификационная мощность115W и нижеИли логотип с рейтингом токаНиже 7аМоторная работа долгое время
Номинальное напряжение12VДвигатель, соответствующая идентификационная мощность40 Вт и нижеИли логотип с рейтингом токаНиже 7аМоторная работа долгое время
(Драйвер может в течение длительного времени выводить номинальный ток 7A, но номинальная мощность, идентифицированная на двигателе = номинальное напряжение/эффективность)
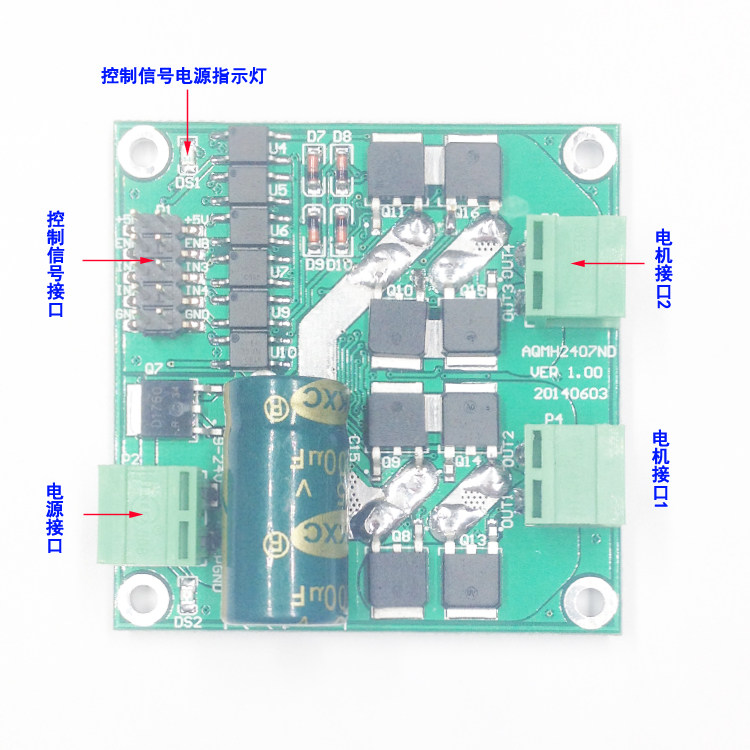
Определение интерфейса
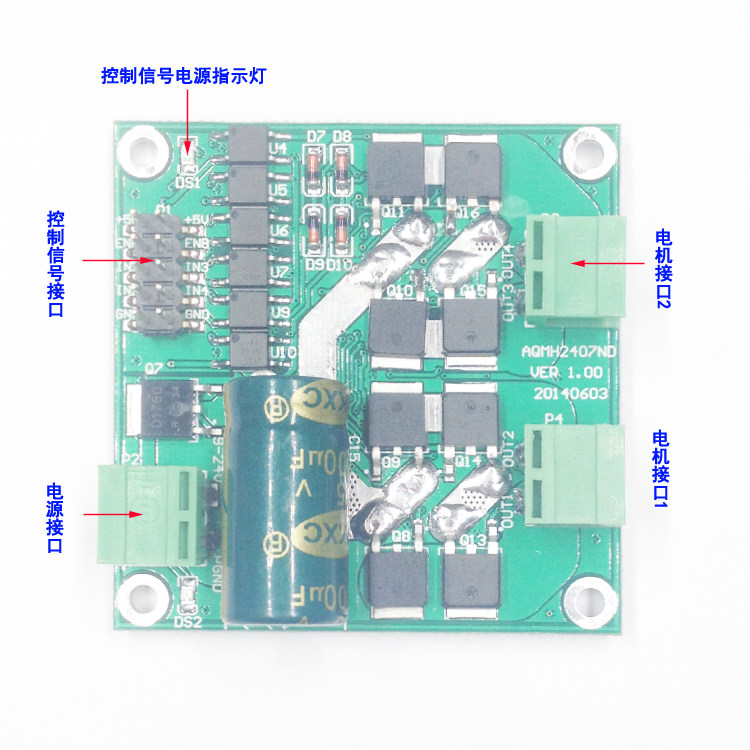
Логика управления сигналом
1. Логика управления двигателя 1 логика управления
| IN1 | IN2 | ENA | Out1, Out2 Вывод |
| 0 | 0 | × | тормоз |
| 1 | 1 | × | Тусоваться |
| 1 | 0 | PWM | Положительная регулировка скорости вращения |
| 0 | 1 | PWM | Скорость обратного тона |
| 1 | 0 | 1 | Максимальная скорость |
| 0 | 1 | 1 | Полное изменение скорости |
Примечание. Входной сигнал на высоком уровне, когда он приостановлен
2. Логика управления двигателем 2
| IN3 | IN4 | ENB | Out3, Out4 Вывод |
| 0 | 0 | × | тормоз |
| 1 | 1 | × | Тусоваться |
| 1 | 0 | PWM | Положительная регулировка скорости вращения |
| 0 | 1 | PWM | Скорость обратного тона |
| 1 | 0 | 1 | Максимальная скорость |
| 0 | 1 | 1 | Полное изменение скорости |
Примечание. Входной сигнал на высоком уровне, когда он приостановлен
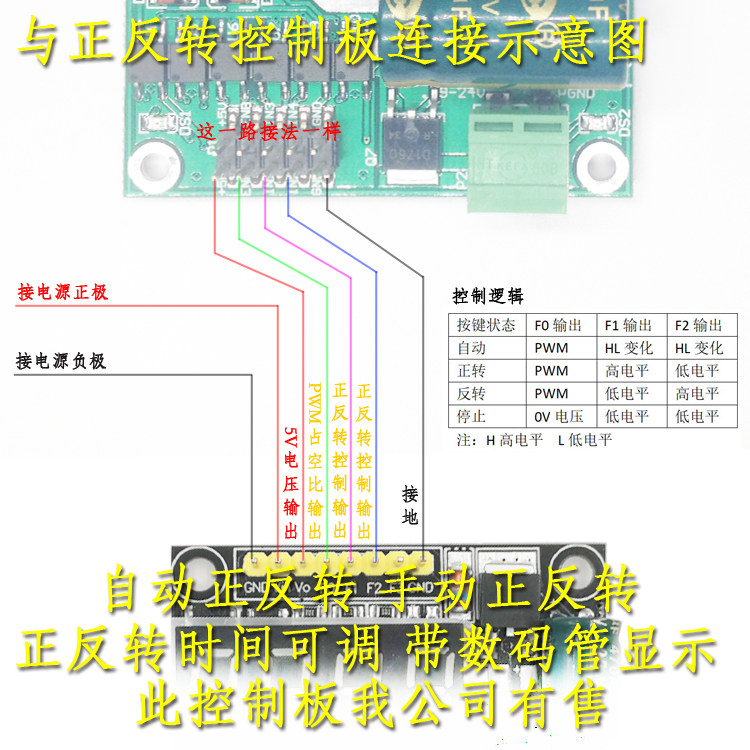
Пример типичных методов соединения
1. Используйте одну машину для управления методом проводки вращения двигателя
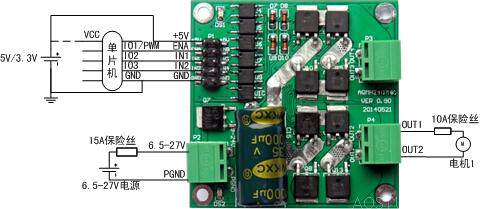
Питание единого микрокомпьютера для однопроизводительного микрокомпьютера должно быть таким же, как и источник питания сигнала управления платой драйвера, но не разделяют место с PGND мощности мощности.При использовании единичного микрокомпьютера 5V приводная плата+5 В подключена к мощности+5V;Одиночные микрокомпьютеры и сигналы управления платой водителя могут использовать источник питания или обеспечивать каждую независимую энергию (но должны быть вместе).ENA подключена к выходному порту GPIO или PWM одноразового микрокомпьютера. .IN1 и IN2 подключены к двум GPIS одноразмерного микрокомпьютера (он может поддерживать произвольный iO -порт 51 Машины. логическая таблица.
2. Используйте кнопку, чтобы управлять методом передней и обратной проводки двигателя
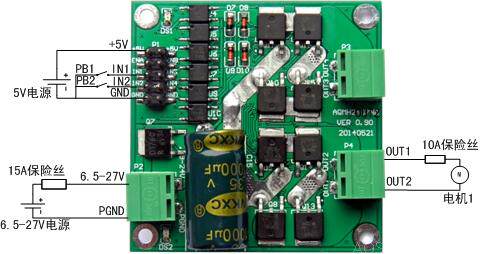
Среди них PB1 и PB2 - два ключа.Когда PB2 нажимается и PB1 не нажимается, IN1 на высоком уровне, IN2 - низкий уровень, а двигатель вращается; когда PB2 нажимается и PB1 не нажимается, IN1 - низкий уровень, а IN2 - высокий уровень. ; Когда как PB1, так и PB2 толкаются или отскочивают, IN2 и IN2 имеют низкий или высокий уровень, моторное торможение (или торможение).Смотрите логику управляющего сигнала.
Определение
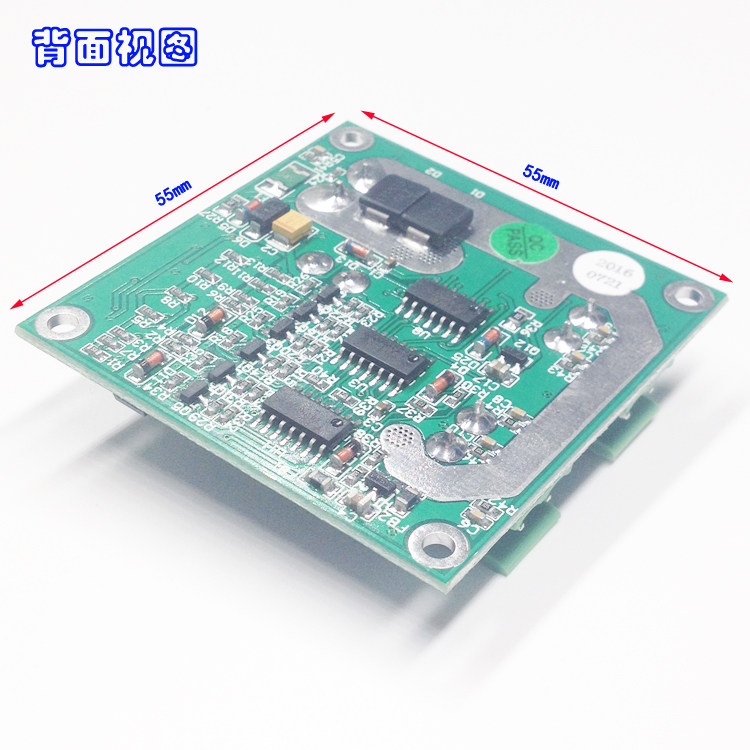
Размер 5,5 см×5.5cm×2,0 см.Установка диаметра отверстия составляет 3 мм, рекомендуется использовать винт M3 для фиксации.При установке обратите внимание, чтобы не позволить задней цепей короткой замыкания. Вы можете добавить изоляционные прокладки или использовать медные столбцы, чтобы поднять плату.
Меры предосторожности
1) Питание водителя не должно быть подключено. Рекомендуется подключить предохранитель 15A на границе с питанием. Напряжение должно быть между 6,5 и 27 В.Если напряжение превышает -латтаж, мощность может сжечь модуль драйвера.
2) Рекомендуется, чтобы номинальный выходной ток источника питания в более чем в 2 раза превышает номинальный ток двигателя, чтобы избежать входного напряжения, что напряжение питания падает, когда источник питания не может быть запущен, когда источник питания не может быть Начал. Приводит к тому, что мотор останавливается.
3) Интерфейс двигателя не должен быть коротким, в противном случае модуль драйвера может быть сгорел. Рекомендуется подключить предохранитель 10A на интерфейсе двигателя.
5) Привод должен быть подключен к двигателю, прежде чем подавать, чтобы предотвратить случайное случайное модуль водителя.
6) Обратите внимание, что драйвер не должен быть приливным, не позволяйте компонентам на плате водителя короткому циркуту, не касайтесь булавок и прокладки компонента на компоненте на руке.