Intel Realsense Deep





Цена: 24 698-29 282руб. (¥1180)
Артикул: 588778231237
Вес товара: ~0.7 кг. Указан усредненный вес, который может отличаться от фактического. Не включен в цену, оплачивается при получении.
Описание товараПродавец:pp741hh
Рейтинг:
Всего отзывов:0
Положительных:0
Выберите вариацию / цвет

Добавить в корзину
Другие товары этого продавца




¥68014 287руб.
¥3988 382руб.
¥3507 371руб.
¥53911 325руб.
| Цвет: | D415, D435 |



1. Intel D415 и D435
Intel  реализм
   и Камера привносит расширенные возможности глубокого восприятия в разработку прототипа.
Камера интегрирована:
Новая Intel![]()   реализм
  реализм![]()   
  
Стерео -датчик изображения: захват изображения и вычислить различия между изображениями
Передатчик инфракрасного сигнала: осветительные объекты и сбор данных глубины
RGB 
Стерео -датчик изображения: захват изображения и вычислить различия между изображениями
Передатчик инфракрасного сигнала: осветительные объекты и сбор данных глубины
RGB 
Яркое пятно
Обе камеры глубины включают ::
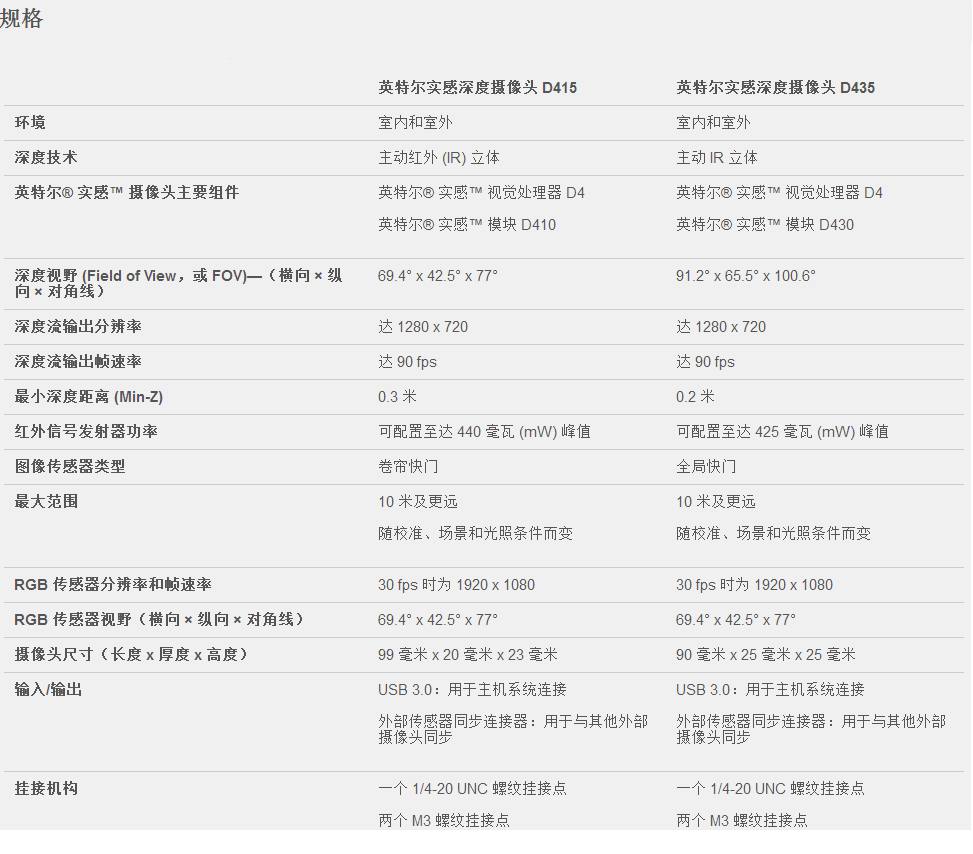
1. Мощный визуальный процессор, который используется процессором 28 nano (nm)  процесс технологии и поддержки 5  MIPI  камера серийный интерфейс 2  канал для вычисления изображения глубины реального времени и ускорения вывода, тем самым генерируя до каждой секунды до каждой секунды 90 кадр (fps)  Глубокий видеопоток.  это лучше, чем первая генерация трехмерная глубина камера 30 fps  60  FPS.
2.Набор датчиков изображения с высоким уровнем резоляции, который предоставляет гундам в глубинном потоке данных 5  двойные пиксели. это можно сгенерировать 1280 x 720&Разрешение NBSP; и разрешение первой генерационной трехмерной глубокой камеры -это 480 x  360.
Обе камеры глубины включают ::
1. Мощный визуальный процессор, который используется процессором 28 nano (nm)  процесс технологии и поддержки 5  MIPI  камера серийный интерфейс 2  канал для вычисления изображения глубины реального времени и ускорения вывода, тем самым генерируя до каждой секунды до каждой секунды 90 кадр (fps)  Глубокий видеопоток.  это лучше, чем первая генерация трехмерная глубина камера 30 fps  60  FPS.
2.Набор датчиков изображения с высоким уровнем резоляции, который предоставляет гундам в глубинном потоке данных 5  двойные пиксели. это можно сгенерировать 1280 x 720&Разрешение NBSP; и разрешение первой генерационной трехмерной глубокой камеры -это 480 x  360.
3. Выделенный процессор сигнала цветного изображения используется для коррекции изображений и увеличения количества данных цвета, что значительно улучшает качество изображения.
Усовершенствованные трехмерные алгоритмы глубины и новые конструкции для достижения более точного глубокого восприятия и дальнего диапазона.  через калибровку частота ошибок трехмерного восприятия глубины низкая, как  1%.  В оптимальной среде эти камеры можно поймать в внутренней и наружной среде 10  Mi Данные.
4.Поддержать новый Cross -Platform Open -Source Intel![]()   реализм
  реализм![]() SDK  2.0, включая несколько операционных систем, третьих сторонных плагин и языков окружающей среды и программирования.
SDK  2.0, включая несколько операционных систем, третьих сторонных плагин и языков окружающей среды и программирования.
Усовершенствованные трехмерные алгоритмы глубины и новые конструкции для достижения более точного глубокого восприятия и дальнего диапазона.  через калибровку частота ошибок трехмерного восприятия глубины низкая, как  1%.  В оптимальной среде эти камеры можно поймать в внутренней и наружной среде 10  Mi Данные.
4.Поддержать новый Cross -Platform Open -Source Intel


Минимальные системные требования:
Шестое поколение (или выше) Intel![]()   Core
  Core![]()   процессор
  процессор
USB 3.0 порт
Windows![]() 10, linux* или Ubuntu 16.04*
10, linux* или Ubuntu 16.04*
Шестое поколение (или выше) Intel
USB 3.0 порт
Windows
преимущество
Обе камеры глубины оснащены новой Intel![]()   реализм
  реализм![]()   визуальный процессор и модуль, используйте спецификации формы, которые могут быть доступны немедленно для обеспечения компьютерного зрения для прототипа.
  визуальный процессор и модуль, используйте спецификации формы, которые могут быть доступны немедленно для обеспечения компьютерного зрения для прототипа.
Intel![]()   реализм
  реализм![]()   глубокая камера D415  оснащен затвором Rolling Image и стандартным видением, чтобы обеспечить общее решение для проекта, чтобы он мог легко добавить данные глубины в существующую систему.
  глубокая камера D415  оснащен затвором Rolling Image и стандартным видением, чтобы обеспечить общее решение для проекта, чтобы он мог легко добавить данные глубины в существующую систему.
Intel![]()   реализм
  реализм![]()   глубокая камера D435 Сущность
  глубокая камера D435 Сущность
Обе камеры глубины оснащены новой Intel
Intel
Intel
Товарная накладная
Intel![]()   реализм
  реализм![]()   глубокая камера D415 или D435
  глубокая камера D415 или D435
USB 3.0 
штатив
Безопасность и правила и правила
USB 3.0 
штатив
Безопасность и правила и правила
2. Камера Intel D435I
D435i добавляет блок IMU BMI055 в D435, который может синхронизировать данные IMU и глубину в режиме реального времени, подходящие для расположения системы робота ROS.
Intel RealSnices D435I включает в себя:
-BMI055 Блок измерения инерции.
-Оалсенс SDK 2.0, он обеспечивает глубину и поток данных IMU.
-Па марки данных IMU по мере необходимости для выравнивания с глубокими данными.
-S настольный штатив.
-USB 3 C Кабель.
Ресурсы развития
Скачать программное обеспечение соединение: https://github.com/intelrealsense/librealsense
Или попросите сотрудников по обслуживанию клиентов забрать сетевой диск.
global  rolling shutter Техническое описание:
  Вся сцена была выставлена одновременно.Все пиксели в датчике собирают свет одновременно и одновременно разоблачают их.То есть в начале экспозиции датчик начал собирать свет;Затем датчик читает фото.ПЗКД является глобальным Все как Юань выставлен одновременно.
Что катится И глобальный В начале экспозиции датчик отсканировал его по линии и выставлен до тех пор, пока все пиксели не будут обнажены.Конечно, все движения завершаются за очень короткий период времени.Разное время экспозиции отличается.  exposure) Если сфотографированные объекты движутся на высокой скорости камеры.Используйте Global И используйте Rolling “ tilt&rdquo“”или“”Это прокатывание&Феномен стрельбы в NBSP;
Rolling   
Применение короткого времени экспозиции (например<500&MU;&NBSP;&Когда MU;&NBSP;
Применение короткого времени экспозиции (например<500&MU;&NBSP;&Когда MU;&NBSP;